Your browser does not seem to support JavaScript. As a result, your viewing experience will be diminished, and you have been placed in read-only mode.
Please download a browser that supports JavaScript, or enable it if it's disabled (i.e. NoScript).
大家有详细步骤怎么运用ros自带的global_planner
需要运行什么包呢
这可怎么办,小车是小强pro 安装的ubuntu16.04 的kinetic镜像
@xiao_ao123 我也是这个问题,请问您解决了吗
@xiaoqiang 我也出现了这个问题ubuntu1是kinetic 16.04 ,是小强pro xq4 的平台 应该怎么解决呢
@weijiz 我想问一下 怎么加呢
@frank 是的 缺失这个 应该怎么弄呢
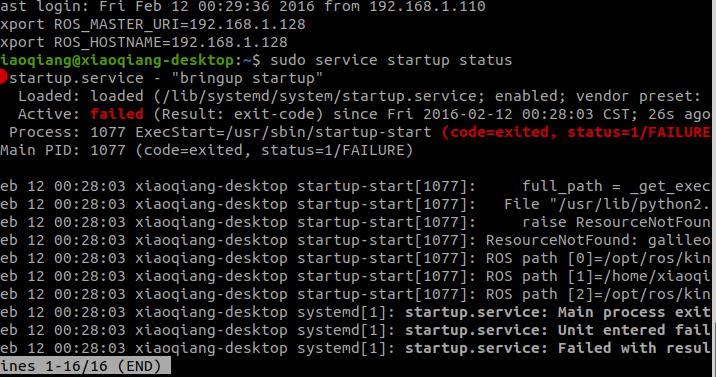
手动开启自启动报错:ResourceNotFound: galileo_api 这个怎么处理呢
小强机器人如果想连接伽利略 需要启动哪些包呢
@weijiz 尝试了您这个办法结果还是不行
大家帮我一下,
@weijiz 手动启动startup也不行,现在使用哪个只能各个单独启动
小强机器人开机不能自启动了,应该怎么办
我想问一下系统恢复设置,是恢复到出厂还是重装系统前
小强因为装vnc不对,现在主机连接显示屏就是黑屏状态,只有一个光标在闪烁,远程ssh 也连接不了机器人了,还有补救办法吗
@weijiz 底盘串口是正确的,startup 这个开机自启动错误是因为什么呢,前几天都好用,
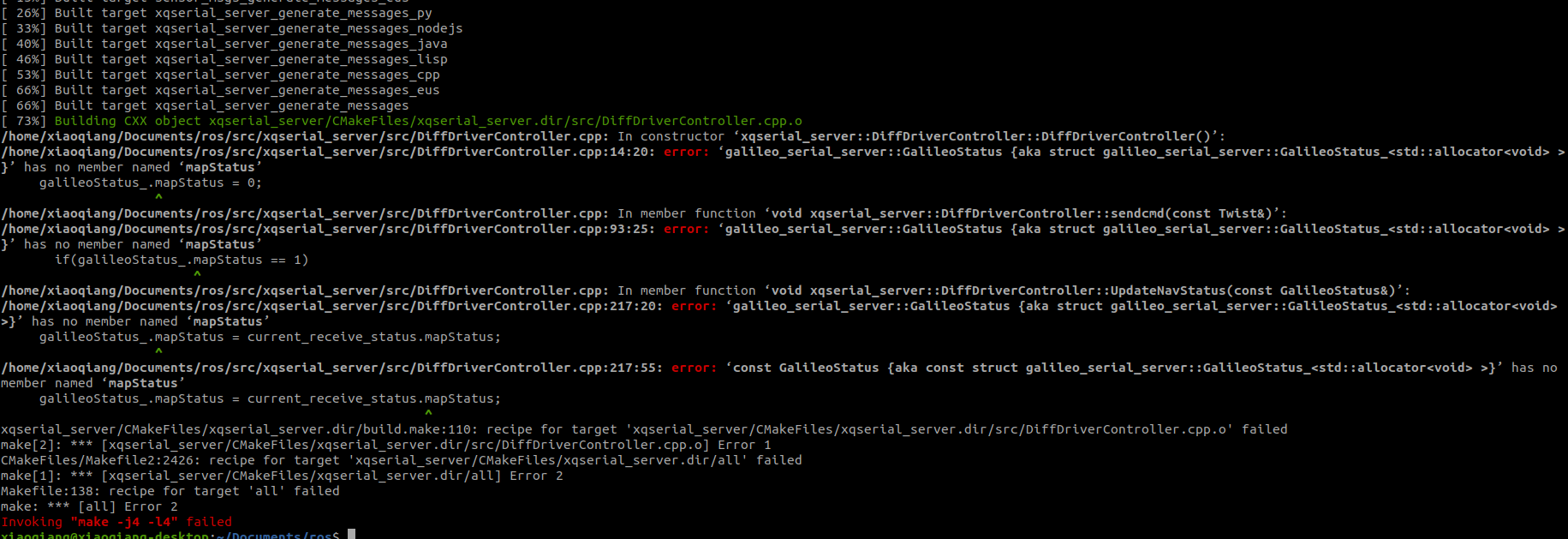
bwcheck 显示机器人的startup 服务程序以及底盘驱动程序为ERROR