我通过gmapping构建的室内栅格地图,不够准确,是否可以通过rivz里的一些工具修改一下地图?
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
RockyRen 发布的最新帖子
-
RE: 教程20里面出现的问题发布在 技术交流
还是有新的问题(
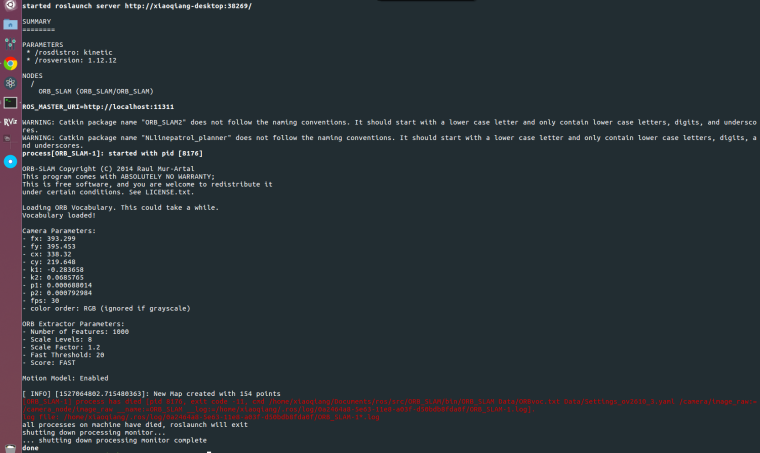
 ),我在运行roslaunch ORB_SLAM ov2610后,该命令行窗口会停留在Model Motion:enable处,然后再另一个窗口运行rosrun orb_init orb_scale.py之后,原来的那个窗口就会报错
),我在运行roslaunch ORB_SLAM ov2610后,该命令行窗口会停留在Model Motion:enable处,然后再另一个窗口运行rosrun orb_init orb_scale.py之后,原来的那个窗口就会报错
。


-
RE: 教程20里面出现的问题发布在 技术交流
感谢,按照上面的步骤已经能够重新运行 roslaunch ORB_SLAM ov2610,不过按照教程20继续走,又在这一步出了问题,麻烦看一下是什么情况?