@weijiz 
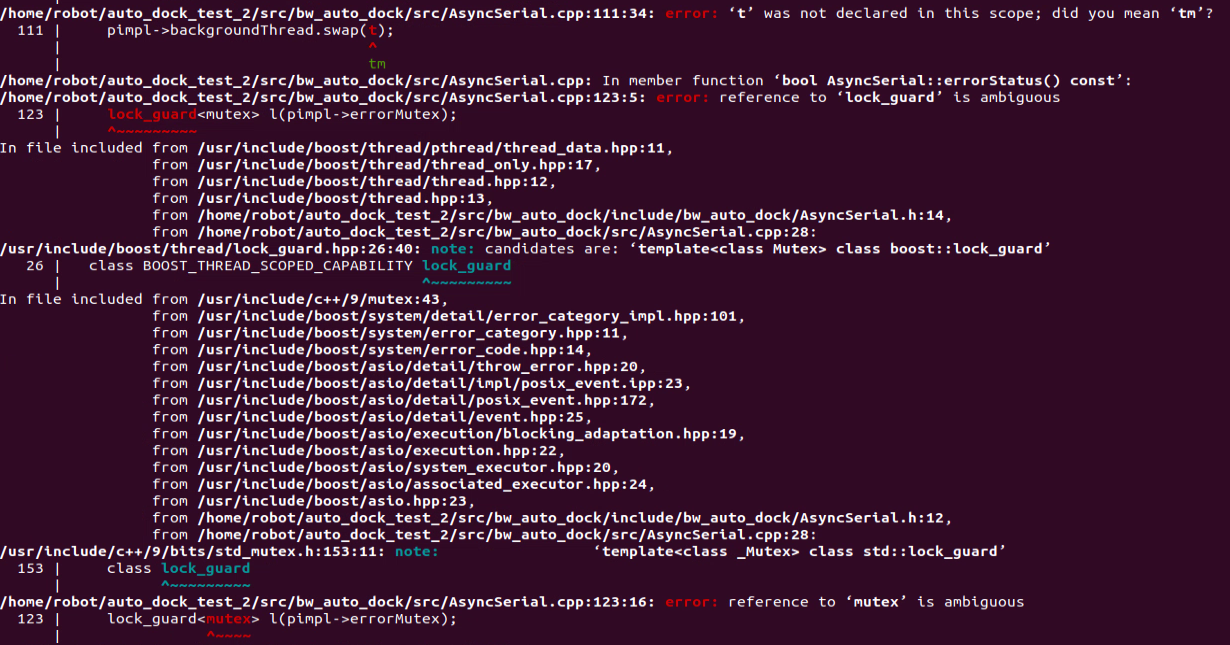
这是完整的信息和报错
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
xiaowei 发布的帖子
-
RE: 小强ROS机器人教程(27)___bw_auto_dock自动充电功能包的使用和实现原理发布在 产品服务
@weijiz
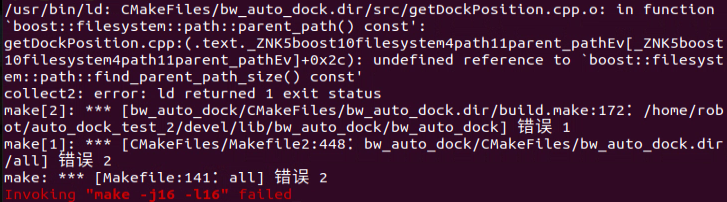
新错误,说是没链接上boost库,但是我安装了的呀,是1.80版本的,在usr/include下面和usr/lib下面都有boost库,有点不知道怎么改了
-
RE: 小强ROS机器人教程(27)___bw_auto_dock自动充电功能包的使用和实现原理发布在 产品服务
@weijiz 在 小强ROS机器人教程(27)___bw_auto_dock自动充电功能包的使用和实现原理 中说:
git checkout noetic-version2
好的好的,好像是这个问题,谢谢了,报了个新的错误,我看能不能解决一下,然后再问
-
RE: 小强ROS机器人教程(27)___bw_auto_dock自动充电功能包的使用和实现原理发布在 产品服务
@weijiz 我是noetic,所以下载的noetic版本,但是无论是noetic还是version2,都是一样的报错
-
RE: 小强ROS机器人教程(27)___bw_auto_dock自动充电功能包的使用和实现原理发布在 产品服务
@xiaoqiang 您好,想问一下安装的环境版本大概有哪些啊,我运行catkin_make,在boost和mutex这里报了非常多的错误