ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
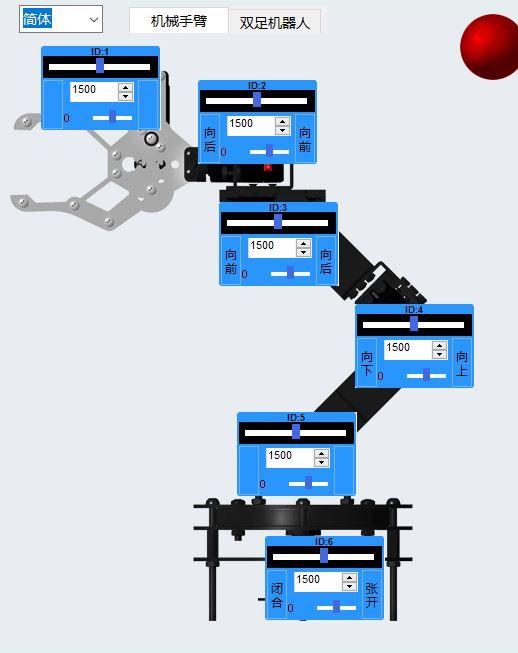
小强ROS机器人教程(22)_操作6自由度机械臂
-
@xiaoqiang 我想对机械臂arduino进行二次开发,之前用了一个别的模型在学习,现在用我们这个真实机械臂,不知道如何下手,可以给点建议吗
-
@鲸鱼 这种舵机的控制方式都是一样的,以前怎么用现在也怎么用
-
这里的ID对应关节编号
-
@xiaoqiang 所以可以不用建模,是吗
-
@鲸鱼 不用moveit就不要
-
@xiaoqiang 好哒,谢谢
-
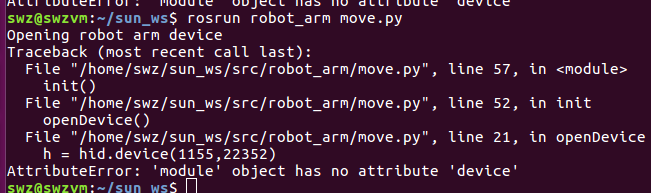
@weijiz 请问,我已经安装了 cython-hidapi 。但是我运行move.py时还是会报这个错误呢?

-
@孙威振 问题解决了,如果安装了上述cython-hidapi还存在同样的问题,可以再新的终端输入:
sudo apt-get install libudev-dev libusb-1.0-0-dev libfox-1.6-devsudo apt-get install libhidapi-hidraw0
-
@xiaoqiang
这个问题如何解决呢?
-
@Arieszzh 你的open failed是怎么解决的?