ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
小强底层固件下载和升级办法
-
2017年3月11日之后收到小强的用户,请参考这篇帖子升级固件,无法升级时请询问客服后再使用下面的方法。手动升级有风险,操作前请咨询客服。
小强v4_3.hex ,右键"另存为…"下载后重名为xiaoqiang.hex
固件是普通hex文件,支持任何stm32下载器。stm32烧录后,请根据升级底盘ros驱动包xqserial_server完成上位机更新操作。最后根据这篇教程重新校准底盘IMU。
下文介绍使用小强自带的u转串烧写stm32的方法,经过本次升级,以后可以使用这篇帖子中的简便升级方法。
1.找到1台windows电脑,下载安装这份stm32flash软件
flash_loader_demo_v2.8.0.exe ,右键选择“另存为…”启动下载
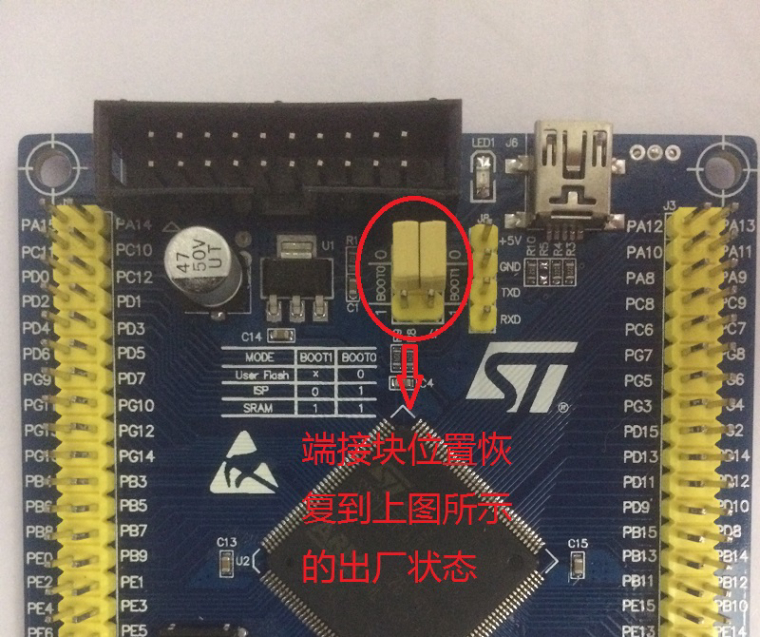
2.小强底盘断电后,先拔下绿色电机驱动板上中间的“VMOT GND”接线,慢慢拔下底盘上的stm32核心板,然后按照下图调整板子上的两个短接帽
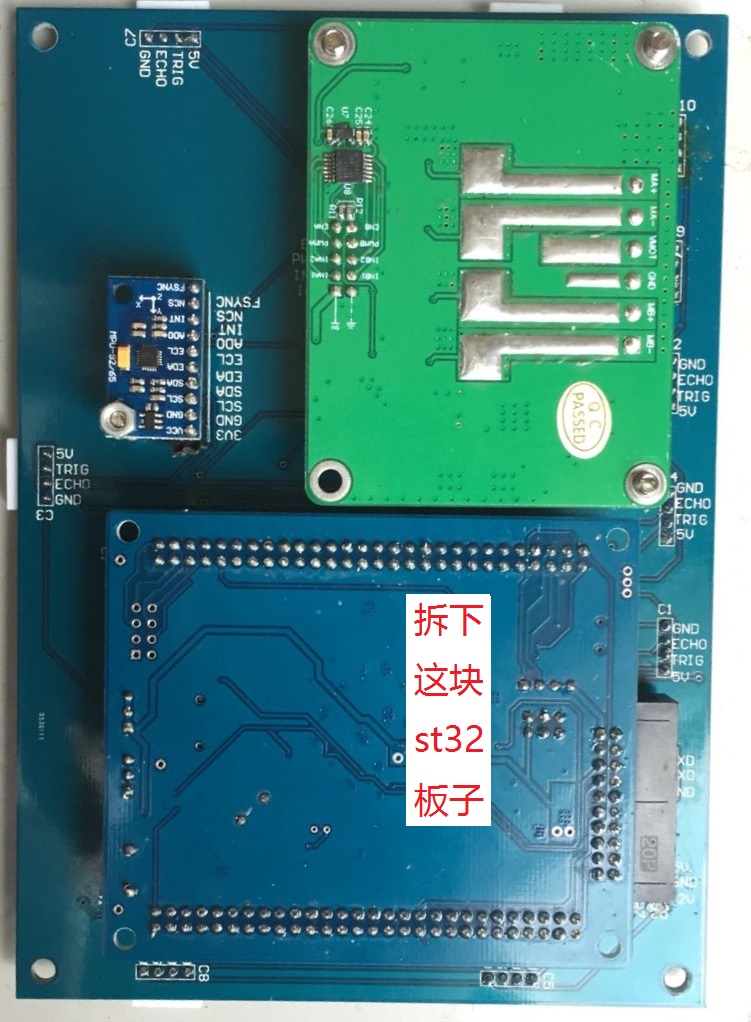

3.将2中调整完后的stm32板子插回底盘,注意引脚需要全部对准插入基座,然后给底盘上电。
4.将小车上的u转串模块usb头从小车主机上拔下后插入windows电脑,从开始程序菜单打开Flash Loader Demo程序,所有程序->STMicroelectronics-> Demonstrator GUI,出现如下界面
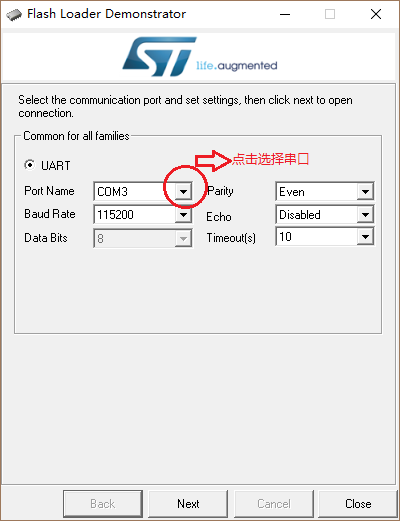
5.选择默认设置即可,一直点next(如果点击next失败,重新给底盘上电后再试),出现如下界面:
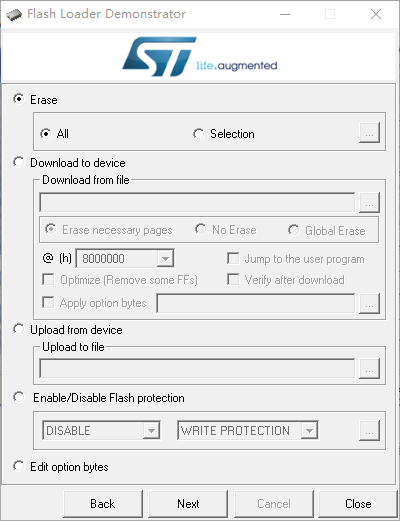
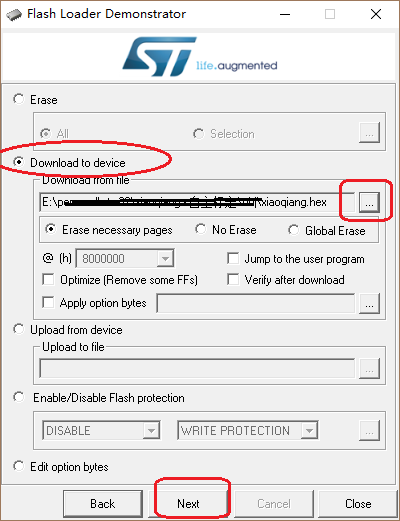
6.选择Download to device,选择上面提供的 hex文件,点Next开始下载
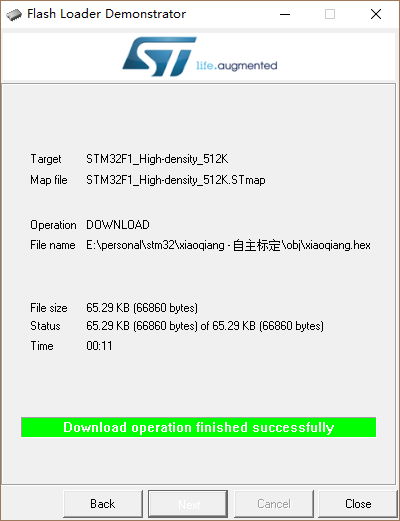
7.烧录完成,关闭软件,小车底盘断电,将u转串插回小车主机。
8.再次慢慢拔下底盘上的stm32核心板,调整板子上的两个短接帽恢复到初始状态后,插回底盘(引脚需要全部对准插入基座),将绿色电机驱动板上中间的“VMOT GND”接线插上,stm32升级完成!
9.小车底盘重新上电,根据文章开头提示完成上位机的升级。