ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
小强底盘固件的自动更新升级方法
-
2017年3月11日之前购买的用户,请根据这篇帖子小强底层固件下载和升级办法进行手动升级
0. 固件不要擅自升级,会严重影响售后
1.更新、升级固件包
ssh xiaoqiang@192.168.xxx.xxx cd ~/Documents/ros/src/stm32loader git stash git pull #对于xq4 pro和xq4 mini用户,请切换到master分支 git checkout master #对于xq5 用户,请切换到lungu分支 git checkout lungu2.开始升级底盘固件
对于2017年3月11日之前购买的用户:由于硬件版本限制,升级固件过程中可能会导致底盘乱动,因此请先拔下绿色电机驱动板上中间的“VMOT GND”接线,升级之后再插回去。
对于2017年3月11日之后购买的用户: 不用插拔任何硬件cd ~/Documents/ros/src/stm32loader sudo ./updateCarROM.sh正常的话会出现下图
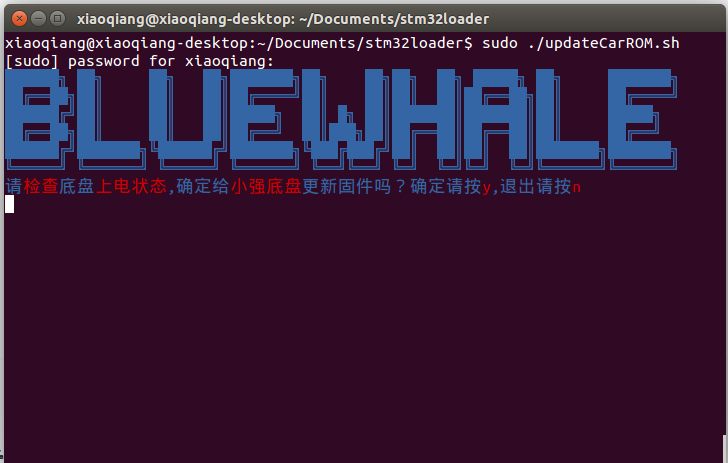
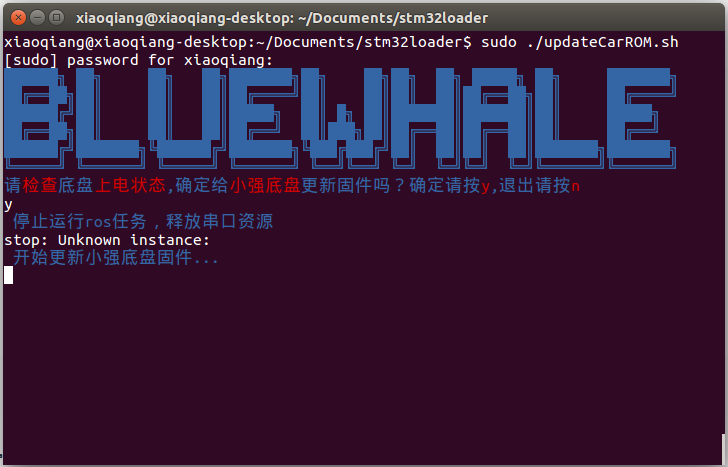
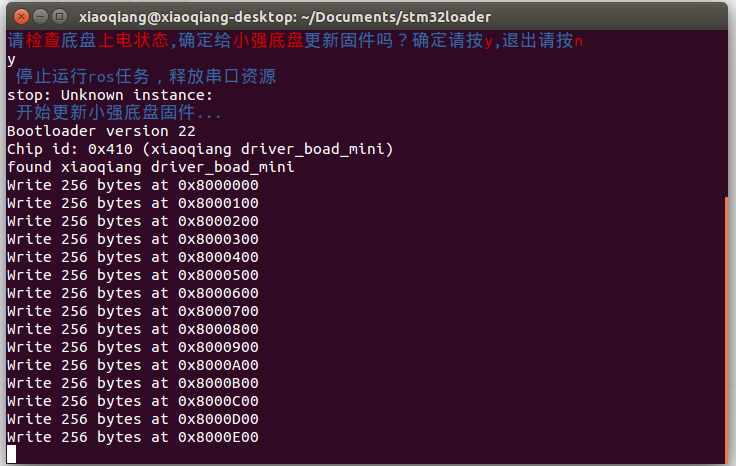
输入y,按回车开始更新
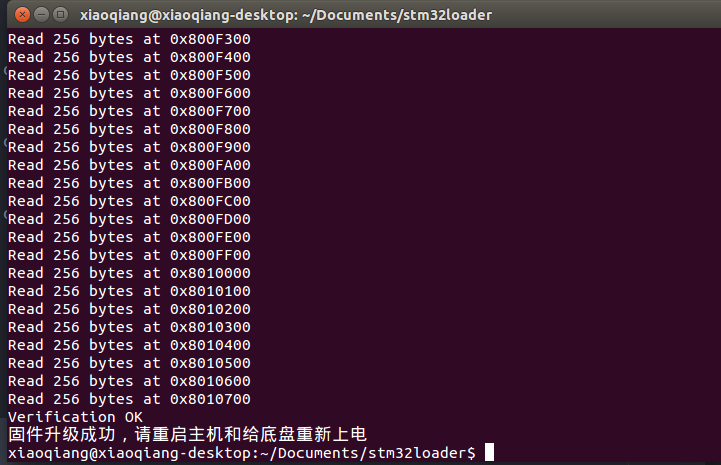
更新成功会出现下图
3.升级成功后的标定操作
请根据升级底盘ROS驱动包XQSERIAL_SERVER完成上位机更新操作。最后根据这篇教程重新校准底盘IMU。
4.升级失败处理办法
如果已经破坏底盘固件,请咨询客服后参考这篇帖子小强底层固件下载和升级办法进行手动升级。
如果没有破坏底盘固件,请检查串口接线是否牢固,然后给底盘重新上电后再次尝试