ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
为什么小强gmapping 建图清晰度不够?附图
-
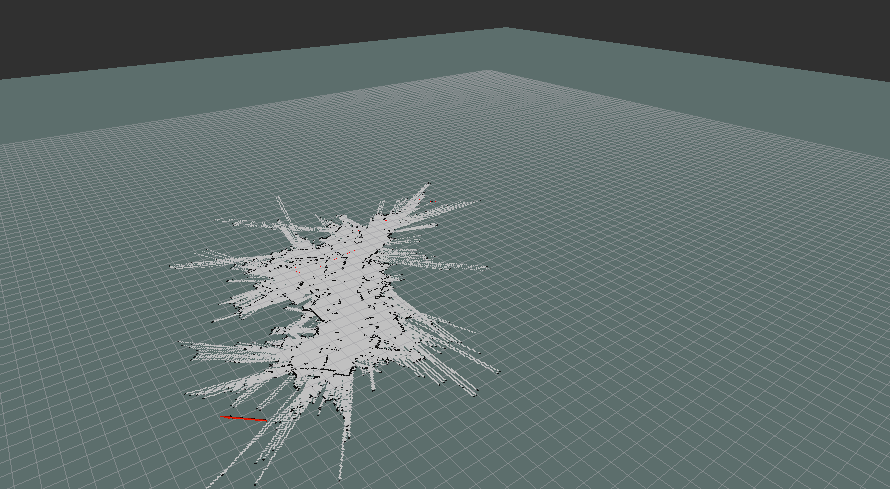
障碍物的轮廓非常不清楚,而且小车的位置总是发生漂移,是参数配置有问题吗?
谢谢。
-
另外,线速度和角速度需要与控制小车移动的速度一致吗?
-
@山中客 这个显然是错误了,不只是清晰度不够。看看里程计准不准还有雷达有没有装反
-
@weijiz 在 为什么小强gmapping 建图清晰度不够?附图 中说:
看看里程计准不准还有雷达有没有装反
感谢回复。
怎么确认里程计是否准确?需要做校准工作吗?
我使用的是小强pro,雷达已经安装好了,应该不会装反吧?再附发一张小强的照片。正面
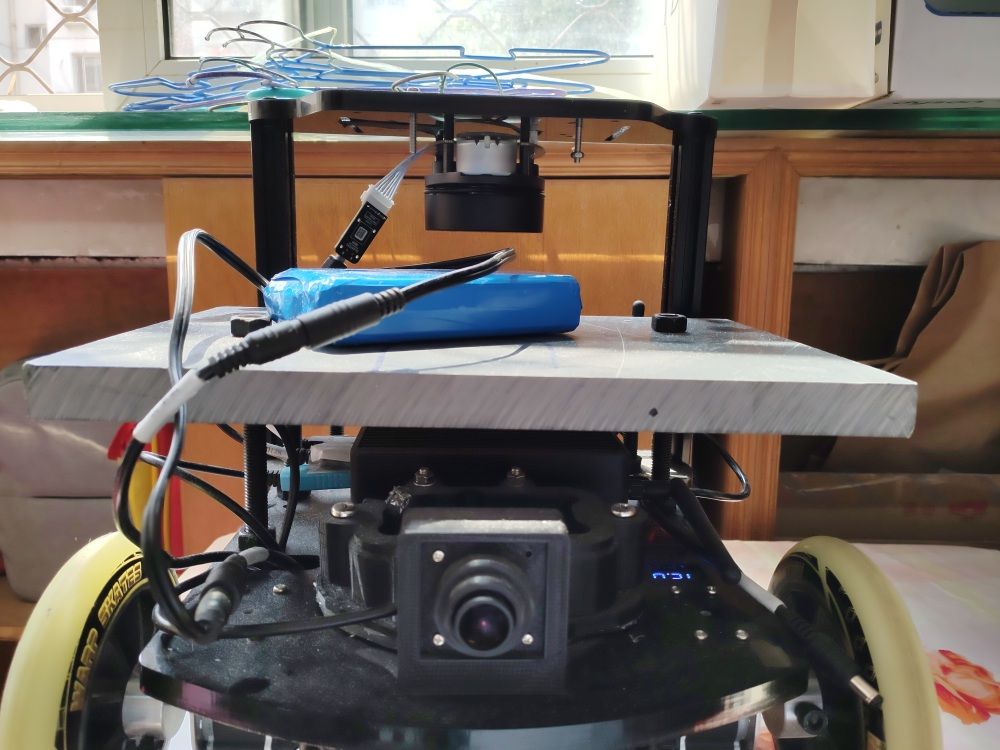
侧面

-
另外我的虚拟机环境,执行rviz 时,会有以下警告,但能够正常显示。
~/Documents/ros$ rviz
[ INFO] [1588045999.551674864]: rviz version 1.12.17
[ INFO] [1588045999.551726648]: compiled against Qt version 5.5.1
[ INFO] [1588045999.551747545]: compiled against OGRE version 1.9.0 (Ghadamon)
[ INFO] [1588045999.777426074]: Stereo is NOT SUPPORTED
[ INFO] [1588045999.777508057]: OpenGl version: 3 (GLSL 1.3).
[ERROR] [1588046006.188003574]: poll failed with error Interrupted system call
[ERROR] [1588046006.188341042]: poll failed with error Interrupted system call
[ERROR] [1588046006.191308788]: poll failed with error Interrupted system call
[ERROR] [1588046006.192157501]: poll failed with error Interrupted system call不知道有没有影响?
谢谢。
-
@山中客 1.你的是小强mini,2.雷达上下反了,你这样是倒立安装,头朝下脚朝上了。
-
@frank
感谢!
确实是安反了,为了能安装机械臂,那是不是需要设置TF,旋转Z轴180° -
@山中客 对,根据自己的安装参数修改tf
-
具体的tf位置在这里
-
@山中客 这种安装反向和普通180度反向是不一样的,雷达旋转方向变了,逆时针和顺时针的区别。除了修改tf 还需要设置rplidar驱动launch文件中的inverted参数http://wiki.ros.org/rplidar
-
@weijiz
嗯,考虑上下反了的话,与小强默认tf配置,x轴y轴应该不变,z轴应该降低了10公分。
然后是延x轴旋转180°。请帮我看一下,最终tf 参数是不是改成这样?
node pkg=“tf” type=“static_transform_publisher” name=“laserlink_broadcaster” args=“-0.20 0 0.2 0 0 3.1415926 base_link laser 100”/
谢谢。
-
@frank
确实旋转方向也变了,翻转参数应该设置成true,感谢! -
好了很多,障碍物轮廓基本正常了。但出了个LaserScan 的error.
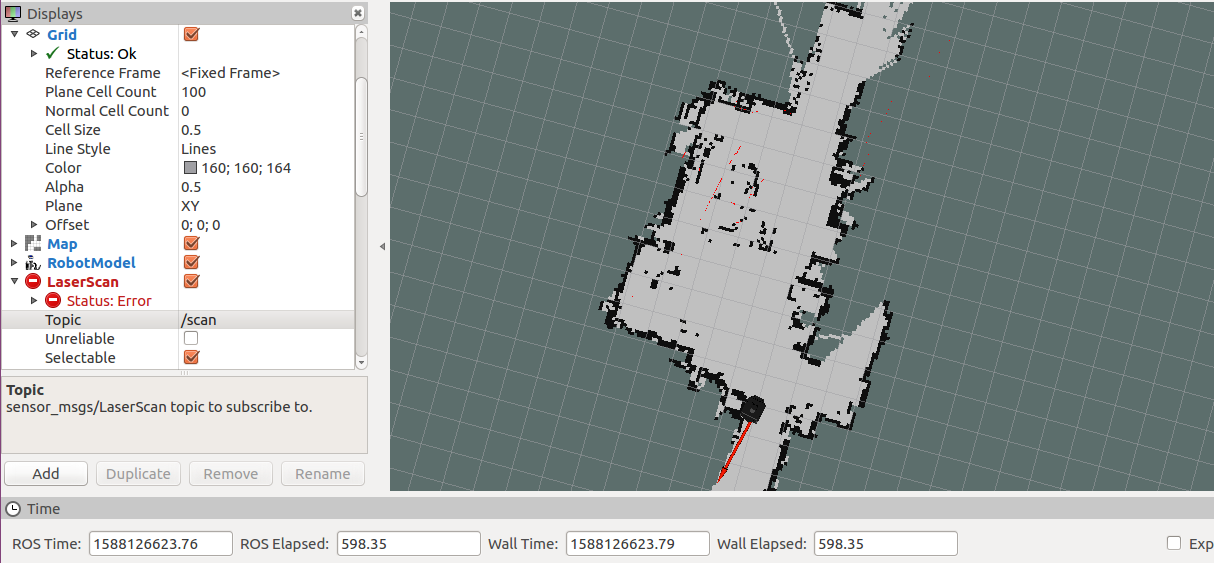
-
@frank 在 为什么小强gmapping 建图清晰度不够?附图 中说:
@山中客 这种安装反向和普通180度反向是不一样的,雷达旋转方向变了,逆时针和顺时针的区别。除了修改tf 还需要设置rplidar驱动launch文件中的inverted参数http://wiki.ros.org/rplidar
实测了一下,雷达转向反转后,反而会出问题,具体原因还没想明白。