ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
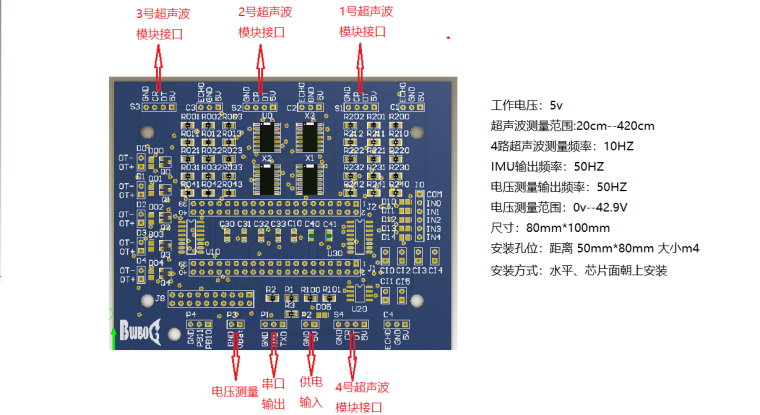
ROS超声波扩展板使用说明
-
1.先固定安装好扩展模块和超声波头,根据下图连接好电源线和通信线。
2.在主机ros catkin工作空间中下载安装模块的ros驱动包
#假设catkin工作空间在~/Documents/ros cd ~/Documents/ros cd src/ git clone https://github.com/BlueWhaleRobot/bw_sensors.git #代码分支选择noetic分支 cd .. catkin_make3.将扩展模块通过usb转串口模块接入主机usb,添加udev规制,
将串口号映射为/dev/bwSensors,同时根据插入的usb端口号进行端口绑定。参考:https://msadowski.github.io/linux-static-port/
#先安装串口设置包 sudo apt-get install setserial #将当前计算机用户名添加进dailout用户组,以xiaoqiang为例 sudo adduser xiaoqiang dialout#查看串口所在usb端口,即下条命令输出结果中/ttyUSBXXX字符前面的数字例如2-6:1.0,/ttyUSBXXX需要替换成实际端口号 udevadm info --name=/dev/ttyUSBXXX --attribute-walk#根据这个端口号和映射信息/dev/bwSensors建立udev规则文件,下面内容可供参考,xiaoqiang需要更换成自己的计算机用户名 ACTION!="add", GOTO="persistent_serial_end" SUBSYSTEM!="tty", GOTO="persistent_serial_end" KERNEL!="ttyUSB[0-9]*", GOTO="persistent_serial_end" # This is old 11.10 style: IMPORT="usb_id --export %p" IMPORT{builtin}="path_id" KERNELS=="2-6:1.0" ,SYMLINK="bwSensors" , SYMLINK+="ttyUSB005" , OWNER="xiaoqiang" ,RUN+="/bin/setserial /dev/ttyUSB005 low_latency" LABEL="persistent_serial_end"#最后重新加载udev规则 udevadm control --reload-rules #重新插拔u转串模块 如果 ls /dev可以看到bwSensors设备,说明操作成功。4.启动ros驱动节点,根据超声波安装位置,可以修改launch文件中的tf变换关系
roslaunch bw_sensors bw_sensors.launch节点启动成功后,会自动发布下列topic
/bw_sensors/IMU 50hz imu话题数据(选配) /bw_sensors/Power 50hz 电压测量值数据 /bw_sensors/StatusFlag 50hz 模块状态数据 /bw_sensors/Sonar1 10hz 1号超声波数据 /bw_sensors/Sonar2 10hz 2号超声波数据 /bw_sensors/Sonar3 10hz 3号超声波数据 /bw_sensors/Sonar4 10hz 4号超声波数据5.在rviz中打开bw_sensors/launch/view.rviz文件,即可观察超声波数据
6.观察IMU数据(选配功能)
#新开一个终端,输入下列命令可视化IMU输出 rosrun bw_sensors visualization.py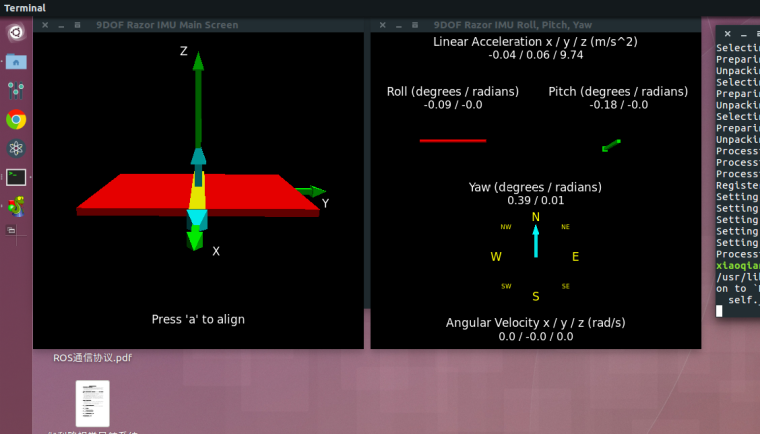
如果运行出错"python no module named visual",先安装visual库sudo apt-get install python-visual7.重新标定IMU(选配功能)
第一次安装模块后,需要重新标定IMU,消除安装误差提高精度,新开一个终端输入下列命令,等待3分钟,模块会自主标定完IMU,然后继续使用。
rostopic pub /bw_sensors/IMU_cal std_msgs/Bool '{data: true}' -1购买请联系淘宝卖家咨询超声波模块
淘宝 -
这个模块的通信协议可有?
-
@robot0612 没有,提供ros驱动包直接使用