ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
小强ROS机器人教程(27)___bw_auto_dock自动充电功能包的使用和实现原理
-
怎么发图片啊?我建立了slambd目录,运行命令后不能保存位置
-
@leslie 应该创建slamdb, 发图片可以点击最右边的上传文件按钮。
-
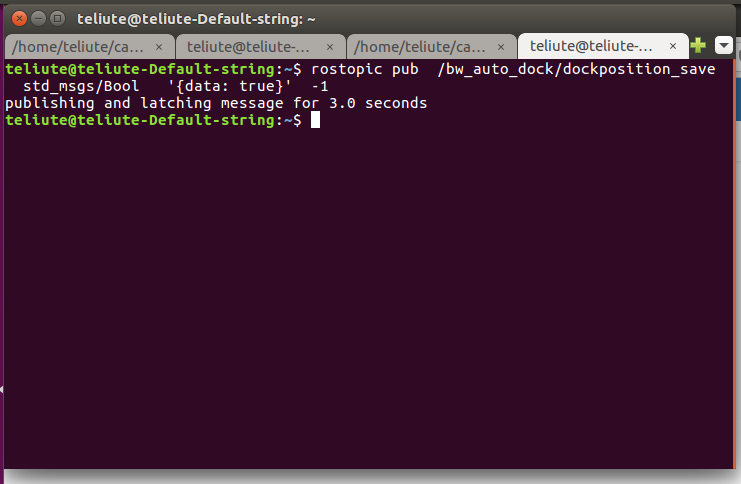
我运行保存位置节点,这是终端显示,然而并没有保存到slamdb目录中
-
@leslie 仔细看上面教程,你发的命令不是保存充电桩命令,同时浏览前人回复的帖子,检查里程计设置
-
这是我启动节点的输出
-
@leslie 你的slamdb 文件夹中应该已经有保存的充电桩位置文件。
如果有更多的问题话,建议加入交流群,这样能够更加及时的回复。群号: 538456117 -
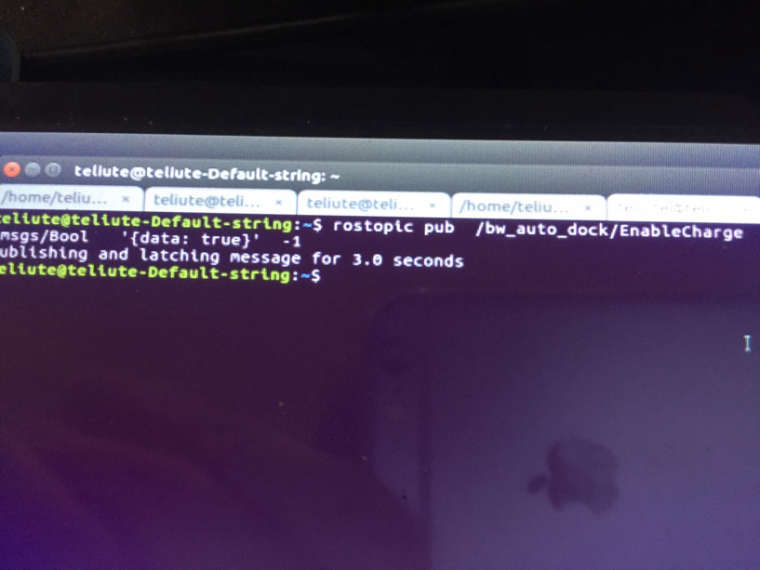
@weijiz 然而并没有啊
-
@leslie 我也遇到了@weijiz 的rostopic pub /bw_auto_dock/dockposition_save std_msgs/Bool ‘{data: true}’ -1
没有文件生成,是怎么解决的 -
@yuggy 之前那位的问题是没有odom数据。你可以看看你的odom数据是不是正常。也可以加入我们的交流群 538456117
-
@weijiz remap from=“/odom” to=“/xqserial_server/Odom” }改成{remap from=“/odom” to=“你的里程计话题名字”
如果我的里程计的名字也是/odom,还需要加上这一句吗 -
@yuggy 如果是一样的就不用remap了,直接删除这行remap from=“/odom” to=“/xqserial_server/Odom”
-
请问非小强用户的里程记名称怎么看呀
-
@chihaotian678 这个和你的机器人驱动相关,一般是发布在/odom话题
-
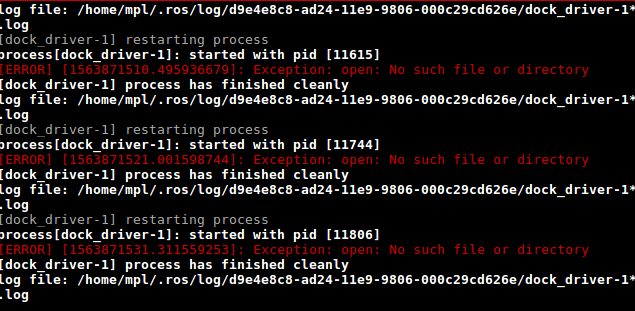
在跑 自动回充装置历程时候出现[ERROR] [1563871562.728507106]: Exception: open: No such file or directory
-
@lovelyyoshino 可能是充电模块串口没插好,也可能是udev规则没设置好
-
@weijiz 在 小强ROS机器人教程(27)___bw_auto_dock自动充电功能包的使用和实现原理 中说:
udev
串口显示是ttyUSB0,我这边不知道怎么回事不能映射,所以把程序里所有的ttyUSB004改成ttyUSB0了
-
@lovelyyoshino 不要设成ttyUSB0,这个端口号很容易被其它程序比如底盘驱动占用,导致冲突
-
usb连接到电脑上 com口找不到?
-
@炙热少年 windows电脑需要安装ftdi串口设备驱动
-
你好 这里有几个问题向请教下,1.非小强用户使用这个充电桩和充电模块的话,需要在哪里发布电池电量的信息?2.知道充电桩的位置后,如何计算两个参考点的位置。