ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
使用pointcloud_to_laserscan包将速腾聚创3d激光雷达转换成高质量2d激光雷达
-
将3d激光雷达转换成2d雷达,有两种方式:一种是只使用3d雷达中的一条扫描线,另一种是将多条扫描线合成一条2d雷达扫描线。使用pointcloud_to_laserscan包可以很方便地实现第二种办法,第二种方法因为使用了多条扫描线,因此可以输出更高质量的2d雷达数据。
下文将演示如何将速腾聚创激光雷达rslidar-16的三维点云数据转换成平面的ros laserscan话题。1.安装pointcloud_to_laserscan包
#需要安装到ros工作空间,以小强主机为例 cd ~/Documents/ros/src git clone https://github.com/BluewhaleRobot/pointcloud_to_laserscan.git cd .. catkin_make2.启动ros_rslidiar雷达驱动包和pointcloud_to_laserscan节点
雷达驱动发布三维点云数据/rsldiar_points, pointcloud_to_laserscan节点订阅后将其转换成laserscan话题/rslidar/scan,两者的frame_id都是“rsldiar”
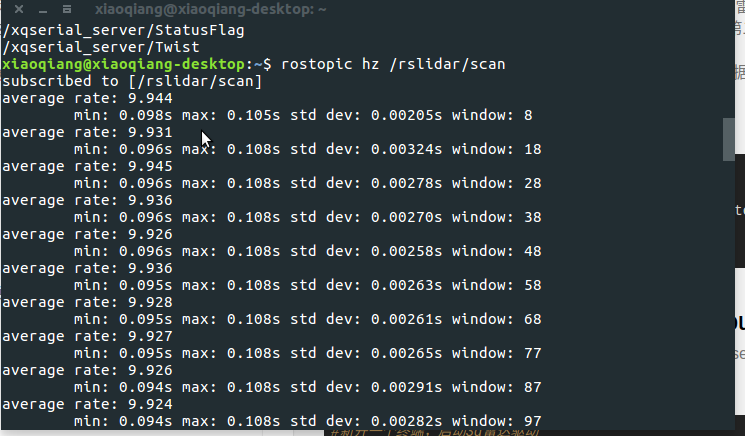
#新开一个终端,启动3d雷达驱动 #如果是小强xq5轮毂电机版本,请启动这个launch文件 roslaunch rslidar_pointcloud xiaoqiang_lungu.launch #如果是小强xq4-pro普通电机版本,请启动这个launch文件 roslaunch rslidar_pointcloud xiaoqiang_pro.launch #新开一个终端,启动pointcloud_to_laserscan节点 roslaunch pointcloud_to_laserscan xiaoqiang_rslidar.launch正常的话,现在就可以获取10hz的laserscan类型话题数据了
4.在rviz中查看2d雷达数据
roscd pointcloud_to_laserscan/rviz/ rviz -d rsldiar.rviz #图中白线就是转换输出的2d雷达数据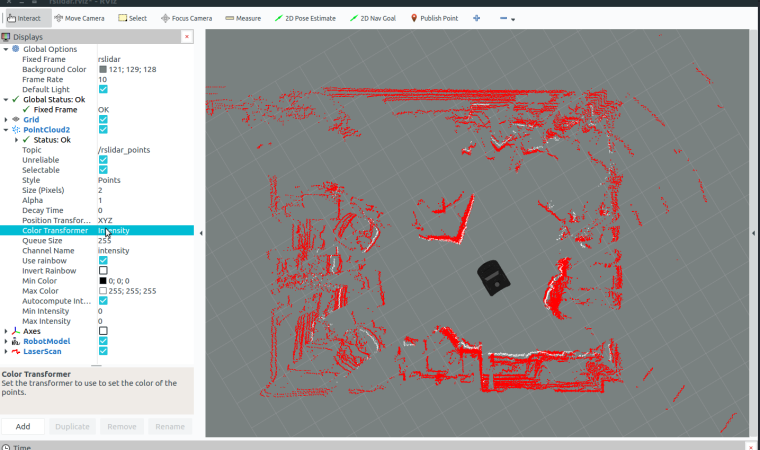
5.pointcloud_to_laserscan 中xiaoqiang_rslidar.launch文件参数简介
pointcloud_to_laserscan假定输入的点云数据坐标系是这样分布的:前进方向为x,重力反方向是z轴,左边是y轴的右手系
min_height 、max_height #这两个参数用来指定这段z轴高度范围内的输入点云将参与转换,范围外的不参与 angle_min、angle_max #这两个参数用来指定这段yaw角度范围内的输入点云将参与转换,范围外的不参与 angle_increment #输出的2d雷达数据的角分辨率,即相邻扫描点的角度增量 scan_time #扫描时间,即话题的发布周期 range_min、range_max #这两个参数用来指定输出数据的有效距离,即2d雷达的有效测量范围 -
原来这个包这个有用,改下launch就能用
-
@xiaoqiang kinect1.0是否也可以用这个包将点云压缩为2D激光雷达?
-
@gejiaqi1117 可以,只要是点云都可以转
-
@weijiz 根据BluewhaleRobot改成这样:<param name=“output_frame_id” value='/kinect_link",<remap from=“cloud in” to=“/kinect/depth/points”/
<remap from=“scan” to =“/scan”但是在rviz中运行freenect-xyz.launch 和这个包时,还是freenect-xyz的点云显示,不知道是不是哪里有问题,请大神帮忙看看,感谢!
-
可否出一个基于kinect转激光雷达的版本
-
@gejiaqi1117 这种教程网上已经很多了,后续我们会在小强的freenect_stack包里面增加一个演示launch文件
-
@xiaoqiang 您好,我在xq4kinect1.0应用此包时,<remap from =“scan” to ="/scan’ />,检查到/scan ranges[inf,inf…],是什么原因呢?
-
@gejiaqi1117 参考这里https://community.bwbot.org/topic/765/使用depthimage_to_laserscan包将kinect深度图像转换成2d激光雷达话题
-
@雾琴水音 参考这里https://github.com/BluewhaleRobot/pointcloud_to_laserscan/blob/lunar-devel/launch/xiaoqiang_lungu_kinect.launch
-
@xiaoqiang 谢谢您