ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
使用kinect进行自主移动避障
-
进行教程的第十步,使用kinect进行自主移动避障,在rviz中一点开file就出现下面问题,请问下应该怎么解决:

而且rviz打开没有出现图像:
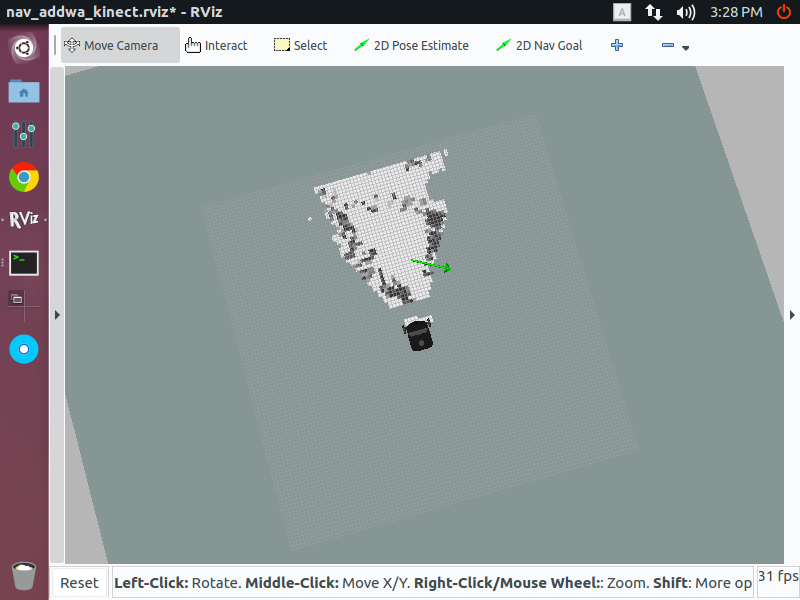
最后能出现小车,但是不能控制小车自主移动:
-
@vvhahaha 列举的异常都不是不能移动的真正原因,这些错误可以忽略。真正的原因可能是设置的目标点周围都是障碍物,本身就是不可到达。还有一个如果是虚拟机方式,确保小强车载主机hosts文件里面添加了虚拟机的ip地址,现在能看到图说明虚拟机可以接收小强主机发出的ros数据,但是小强主机无法接收到虚拟机发出的ros数据。
-
好的,谢谢,现在小强已经能正常移动了