ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
小强ROS机器人教程(22)_操作6自由度机械臂
-
6自由度机械臂的资料在这个百度云盘链接里:http://pan.baidu.com/s/1nuBpDaD 请仔细阅读二次开发部分的串口通信协议、虽然下文使用的是usb hid通信方式,但命令格式是一样
下文将操作6自由度机械臂完成主控板上存储的3组动作。
控制原理: 小车主机使用usb连接机械臂主控板,用户发送名为robot_arm/cmdstring的topic,这个topic内容为控制命令,最后由robot_arm节点负责将这个topic内容经由usb hid协议发送给机械臂主控板。
1.运行robot_arm节点
rosrun robot_arm move.py #robot_arm包代码在这里 http://git.bwbot.org/publish/robot_arm启动正常,机械臂会执行动作0(默认状态),同时命令窗口会显示如下内容
xiaoqiang@xiaoqiang-desktop:~/Documents/ros$ rosrun robot_arm move.py Opening robot arm device Manufacturer: MyUSB_HID Product: LOBOT Serial No: 8D9823654852 Run the zero group action2.构造robot_arm/cmdstring topic
robot_arm/cmdstring 这个topic 类型是std_msgs.msg中的String 即字符串。根据上文提供的机械臂二次开发资料,我们可以知道6自由度的控制协议是由一个无符号byte数组表示,因此我们在这里稍加改造,直接将这个数组的hex值变成字符串打包成topic命令。变换方式是采用python的byte array表示方式,将数组中每个元素的hex编码串在一起,然后将其中的0x换成\x。
例如: [0x55,0x55,0x05,0x06,0x00,0x01,0x00] 这个控制命令数组,转换成robot_arm/cmdstring 内容是,'\x55\x55\x05\x06\x00\x01\x00' 小技巧:看不懂的话,还可以用python的map函数帮忙转换,找规律。list(map(ord,'\x55\x55\x05\x06\x00\x01\x00'))我们要控制机械臂完成3个动作,这三个字符串内容如下
'\x55\x55\x05\x06\x00\x01\x00' '\x55\x55\x05\x06\x01\x01\x00' '\x55\x55\x05\x06\x02\x01\x00' 找到规律没...3.发布运动命令
新开一个命令行终端,因为是演示,所以直接使用rostopic 的pub功能,将上面的字符串命令打包成topic发给robot_arm节点 动作1: rostopic pub robot_arm/cmdstring std_msgs/String '\x55\x55\x05\x06\x00\x01\x00' 动作2: rostopic pub robot_arm/cmdstring std_msgs/String '\x55\x55\x05\x06\x01\x01\x00' 动作3: rostopic pub robot_arm/cmdstring std_msgs/String '\x55\x55\x05\x06\x02\x01\x00'4.运动结果暂时没有视频,需要自己实际操作,觉得运动不满意的话请参考我们这个舵机运动控制帖子:电机控制与缓动函数
-
请问一下有机械臂的功能包供下载吗
-
-
请问下我运行robot_arm节点时出现Opening robot arm device 段错误 (核心已转储) 是怎么回事
-
@kadian 有一个系统自带的包会干扰程序,需要把它卸载掉。
sudo apt-get remove fwupd -
请问机械臂有相关的模型文件吗
-
@kadian 没有
-
我用Arduino对机械臂二次开发实现机械臂逆运动,自主抓取目标,然后将arduino写成ros中的节点去订阅目标的位置消息,但是机械臂LSC控制板如果连在Arduino上 ,Arduino就无法收到topic发送的消息,请问有解决办法吗?
-
@kadian 是用的串口连接控制LSC吗?这里可能和rosserial端口冲突了,调整配置一下串口端口号。还有建议不用arduino,把目前arduino的功能封装成一个ros包里面,然后直接运行在ros master主机上。
-
@xiaoqiang 用LSC的TX接Arduino的RX,RX接TX。听了您的建议我也认为不用arduino,将arduino功能封装进ros包里比较好,但是我运行你们提供的ros包后系统报错:
rosrun robot_arm move.py Opening robot arm device 段错误 (核心已转储)按照你们之前说的
sudo apt-get remove fwupd也没用。
-
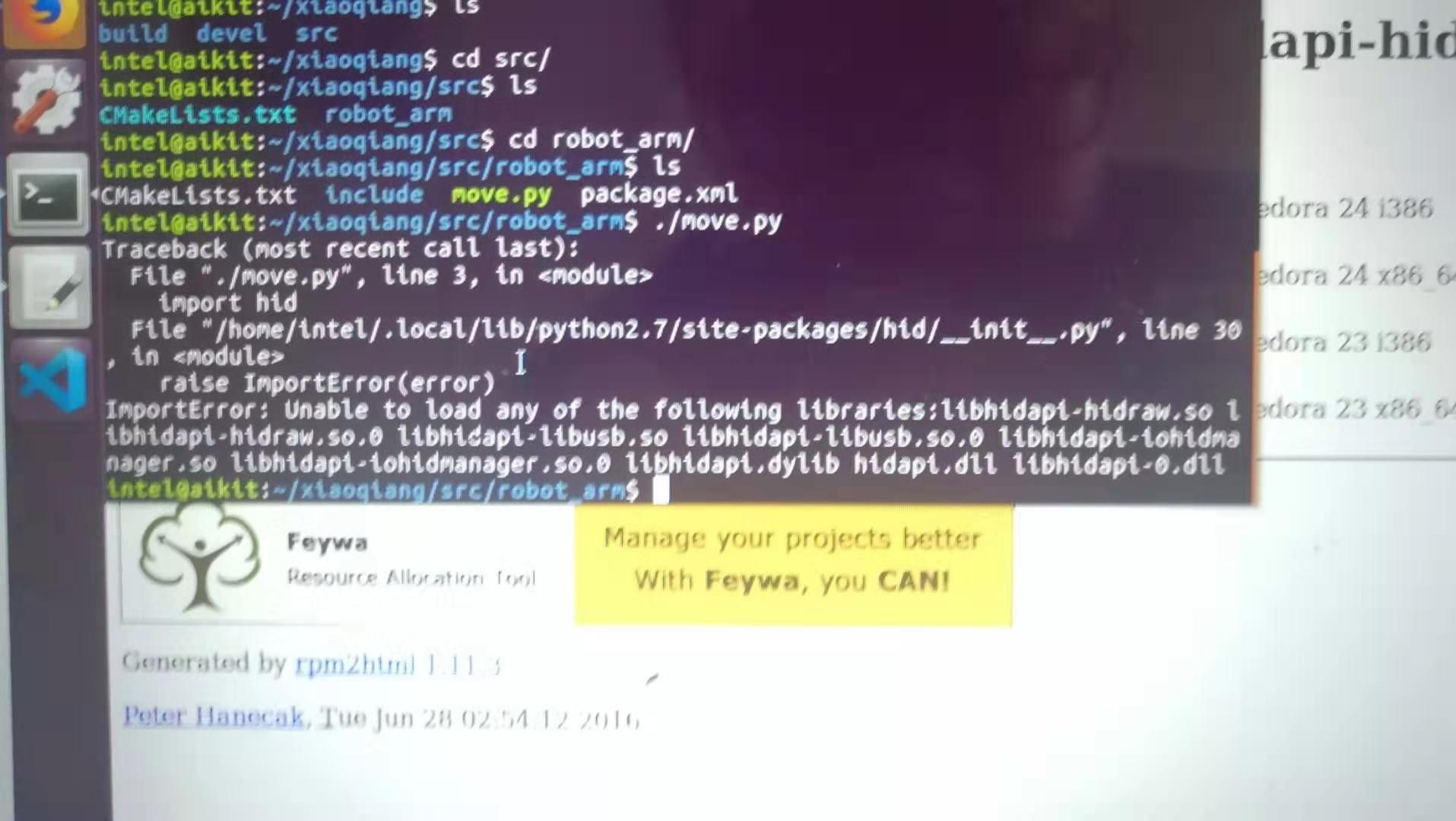
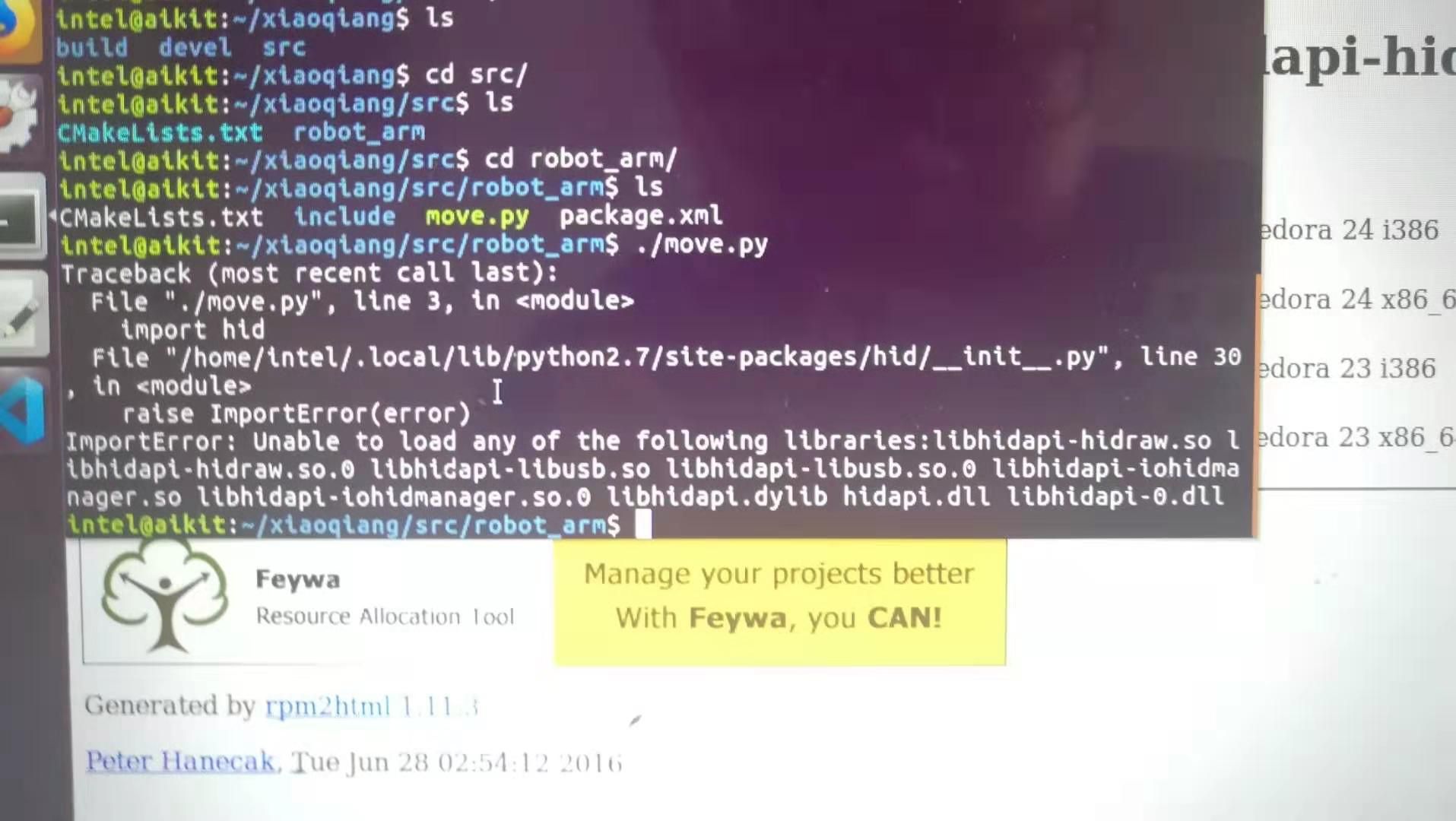
.运行robot_arm节点
rosrun robot_arm move.py 出现错误 @weijiz @xiaoqiang
-
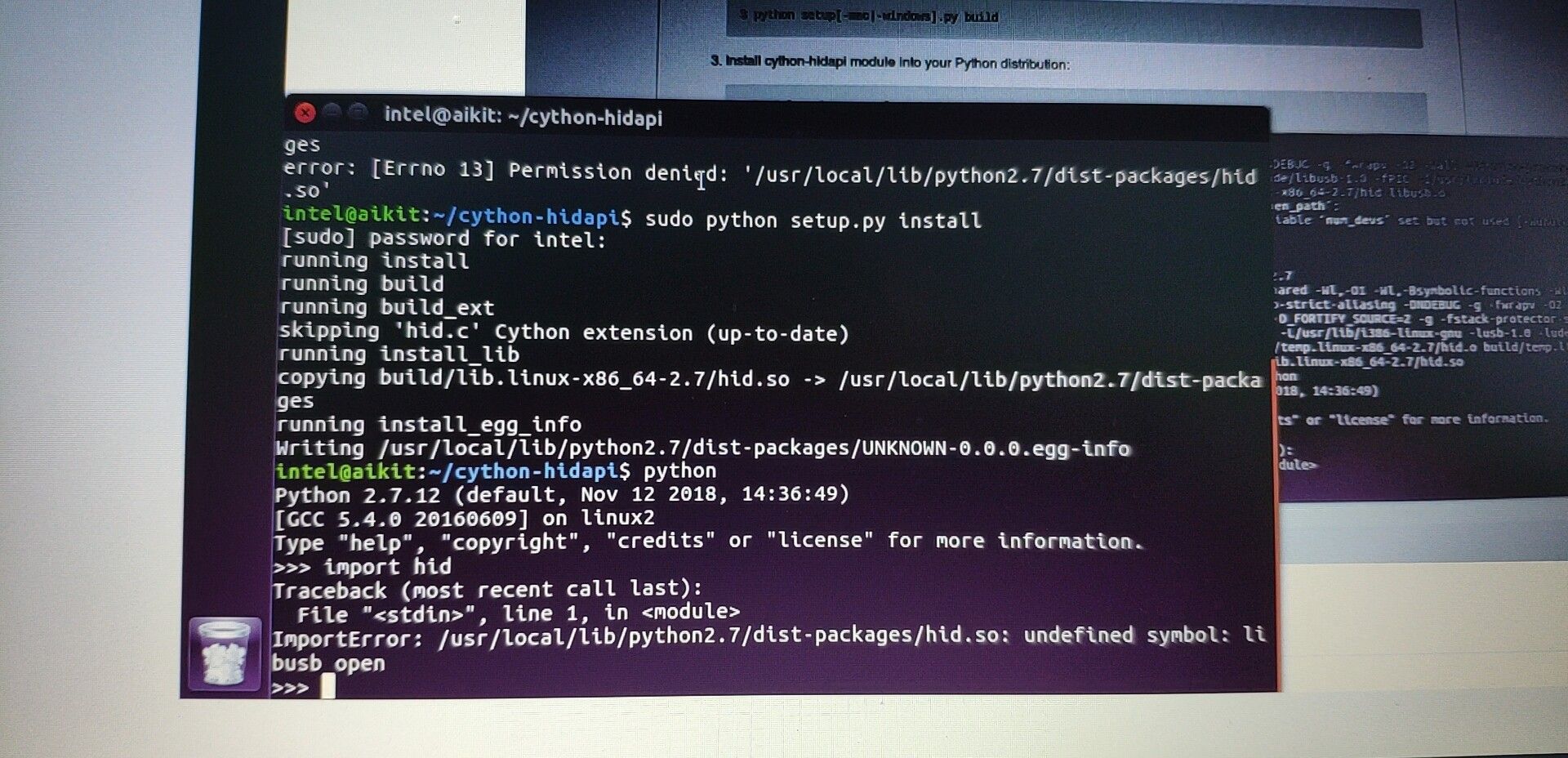
@Arieszzh 需要安装这个包 cython-hidapi 才能用
-
安装过程中出现错误,hid-windows.c:23:21:fatal error:windows.h:No such file or directory
error:command ‘x86_64-linux-gnu-gcc’ failed with exit status 1
@weijiz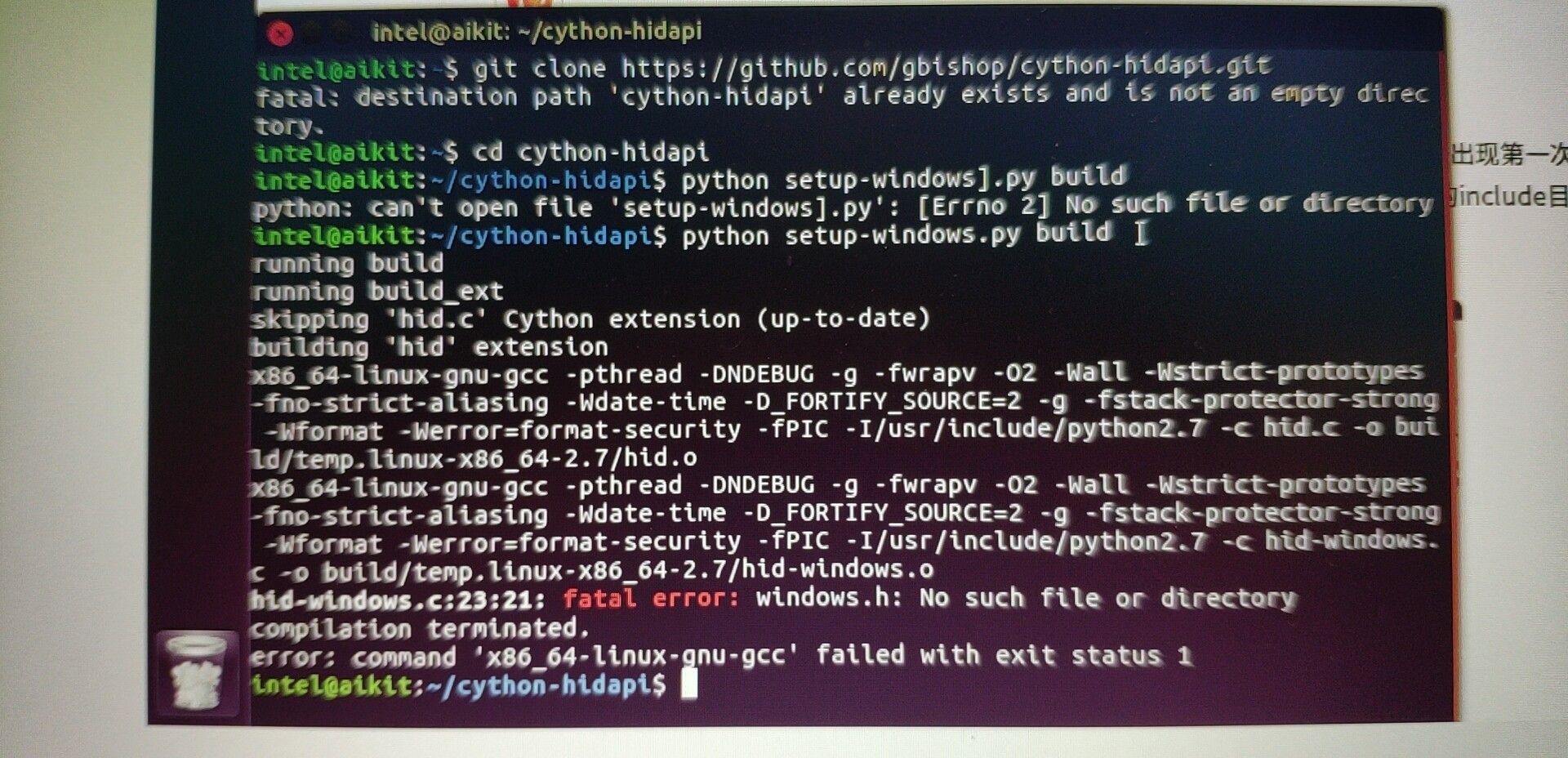
-
@Arieszzh 你指令写错了,那个是让你根据系统输入的意思,linux输入
python setup.py build -
指令已经更改,但是用python检测安装时还是出现问题了@weijiz
ImportError:No module named hid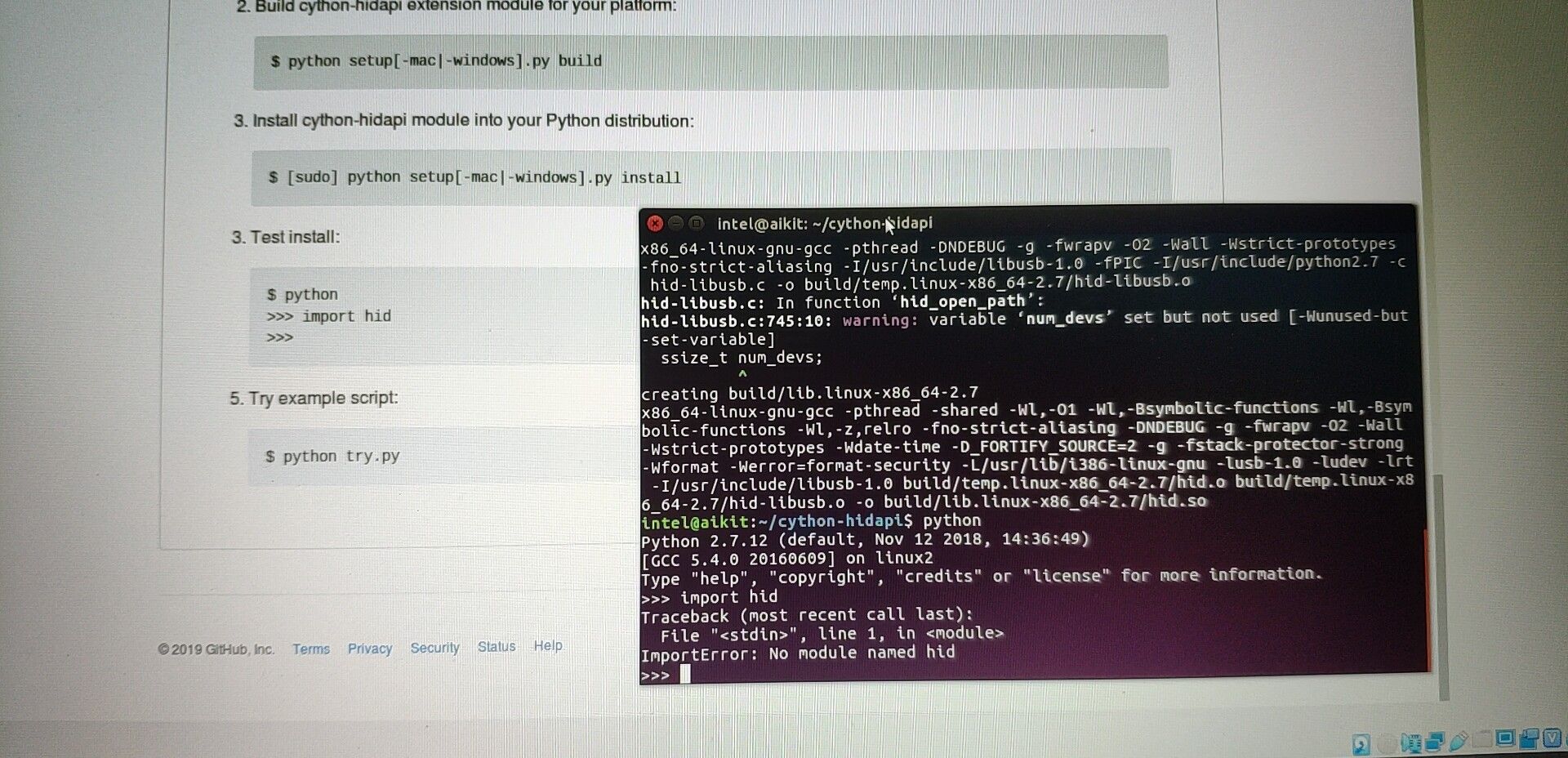
-
您好,现在是这个错误,不太清楚怎么解决
@weijiz
-
此回复已被删除! -
之前的问题似乎是解决了,从别人那里拷了hid.so文件,但是再次运行节点后还是出错了,想再问一下您
@weijiz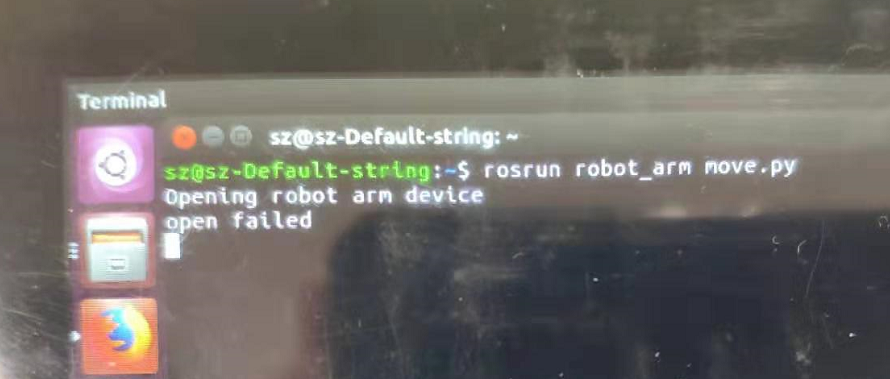
-
@Arieszzh 我也有这个问题,请问你从哪拷贝的hid.so文件,可以发给我吗?
-