2017.5.13
蓝鲸ROS是蓝鲸智能机器人公司在Ubuntu ROS的基础上进行修改而制作的ROS系统镜像。其中包含了ROS系统和常用的一些ROS软件包。非常适合ROS学习和开发人员使用。系统安装完成后不需要再安装配置ROS,即可直接使用。蓝鲸ROS也是小强的系统镜像,可以安装在小强上直接使用。

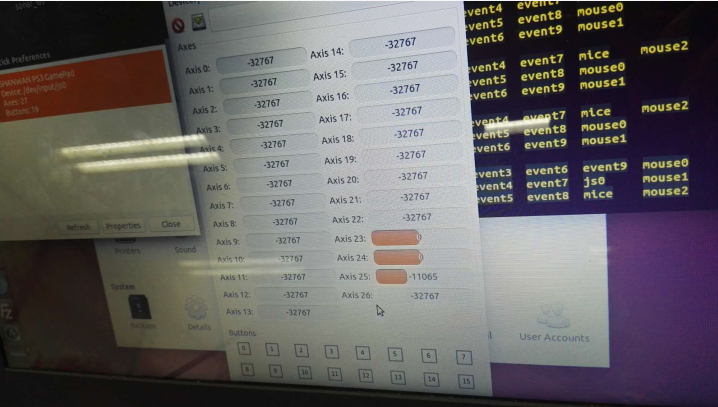
XQOS 系统桌面截图
蓝鲸ROS镜像可以安装在小强上面,根据不同的硬件平台我们发布了不同版本的系统。方便大家在系统出现问题后能够自己重新安装。
在一般的ROS基础上我们还集成了一些很方便的功能。比如vnc服务,远程协助,系统自检等。
希望大家能够喜欢。
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
Yangoogle 发布的帖子
-
蓝鲸ROS操作系统(XQOS)发布了发布在 蓝鲸智能大事记

-
Blue Whale ROS Operating System (XQOS) released发布在 Bluewhale Events
2017.5.13
Blue Whale ROS is a ROS system image created by Blue Whale Intelligent Robotics based on Ubuntu ROS. It contains the ROS system and some commonly used ROS packages. Ideal for ROS learning and developers. After the system is installed, you do not need to install and configure ROS, you can use it directly. Blue Whale ROS is also a system image of Xiaoqiang, which can be installed directly on Xiaoqiang.

XQOS system desktop screenshot
The Blue Whale ROS image can be installed on Xiaoqiang. We have released different versions of the system according to different hardware platforms. It is convenient for everyone to reinstall themselves after a problem occurs in the system.
Based on the general ROS, we also integrate some very convenient functions. Such as vnc service, remote assistance, system self-test, etc.
Hope everyone likes it.
-
Blue Whale Intelligence won the third prize of advanced manufacturing in Shenzhen Innovation and Entrepreneurship Competition发布在 Bluewhale Events
2017.8.1
In this year’s Innovation and Entrepreneurship Competition, after fierce competition, we won the third prize in the advanced manufacturing industry. This award is an affirmation of our work and achievements. We will continue to create brilliance.
Third Prize for Advanced Manufacturing of Innovation and Entrepreneurship Competition
-
蓝鲸智能获得深圳创新创业大赛先进制造三等奖发布在 蓝鲸智能大事记
2017.8.1
在今年举办的创新创业大赛中,经过激烈的角逐,我们获得了先进制造行业的三等奖。这个奖项是对我们的工作和成果的肯定。我们会再接再厉,继续创造辉煌。
创新创业大赛先进制造三等奖奖状
-
Galileo navigation system debut at the World Robotics Congress发布在 Bluewhale Events
2017.8.23
The first World Robot Conference was jointly organized by the China Association for Science and Technology, the Ministry of Industry and Information Technology, and the Beijing Municipal People’s Government. It is aimed at implementing the spirit of the internship of General Secretary Jin Ping at the 2014 Academician Conference. Promote innovation-driven development strategy and realize the robot industry event that spans the development of China’s robotics technology and industry. In this year’s robotics conference, the Galileo navigation system that we have studied over a year has finally made its debut!
The Galileo visual navigation system is a complete navigation solution based on visual navigation, path planning, obstacle avoidance, and environmental recognition. Can be used in indoor service robots, industrial AGV, outdoor patrol and other application scenarios. This system does not require users to have a deep understanding of ROS, all functions are exposed to users through the RESTFUL API, the actual development and use are very convenient.
Learn more (http://www.bwbot.org/content/galileo)
-
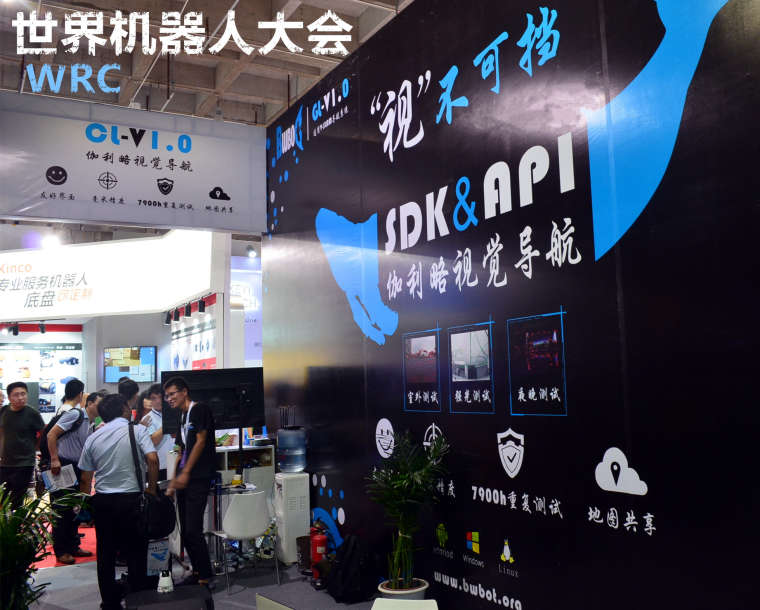
伽利略导航系统在世界机器人大会闪亮登场发布在 蓝鲸智能大事记
2017.8.23
世界机器人大会(World Robot Conference)首届是由中国科学技术协会、工业和信息化部、北京市人民政府共同举办,是旨在贯彻落实习近平总书记在2014年两院院士大会上的讲话精神,积极推动创新驱动发展战略,实现我国机器人技术与产业的跨越发展的机器人产业盛会。在今年的机器人大会中,经过我们一年多研究的伽利略导航系统终于闪亮登场了!
伽利略视觉导航系统是在视觉导航的基础上集成路径规划,躲避障碍物,环境识别等一系列完整导航解决方案。可以用在室内服务机器人,工业AGV,室外巡逻等等应用场景上。此系统不需要用户对ROS有深入了解,所有功能都通过RESTFUL API暴露给用户,实际的开发使用都十分方便。
了解详情(http://www.bwbot.org/content/galileo)
-
ROS wheel motor drive release发布在 Bluewhale Events
2017.11.22
The hub motor is a new type of motor that combines a wheel and a motor. It is widely used in electric vehicles to balance the car. Due to its excellent sporting performance and high cost performance, we decided to develop a ROS drive for a hub motor.

The general drive only provides a simple open loop speed control function. Our drives offer closed loop speed control with control accuracy of less than 1%. The maximum power is 1080W (single 540W). Operating voltage is 12V to 36V (supports lithium battery). Especially at low speeds, our performance far exceeds other drives on the market. Not only that, we also offer the ROS driver for this drive. This allows you to directly control the motor motion in the ROS. At the same time, the drive also provides 9-axis gyroscope data and odometer data. Convenient to continue to develop ROS-related navigation programs. And this driver can be equipped with infrared sensor and ultrasonic sensor. Really powerful and full-featured, it is the first choice for robot development.Taobao link:https://item.taobao.com/item.htm?spm=a1z10.1-c.w4004-11026595866.8.56528335UBc6Na&id=559950579276
-
Xiaoqiang and ifm debut at Shanghai International Logistics Exhibition发布在 Bluewhale Events
2017.10.31
![0_1536226535645_上海物流展[1].png](/assets/uploads/files/1536226536180-%E4%B8%8A%E6%B5%B7%E7%89%A9%E6%B5%81%E5%B1%95-1-resized.png)
Shanghai International Logistics Exhibition is a grand event with great influence in the international logistics robot industry. Exhibitors include large logistics companies from around the world. Xiaoqiang and ifm made their debut at this year’s show!
The Xiaoqiang who participated in the exhibition carried our Galileo visual navigation system. First, move through the remote control Xiaoqiang, let Xiaoqiang record the surrounding environment and establish an environmental map. Then draw the route it wants to move through our software in the map it creates. After everything is set up, Xiaoqiang can follow the marked route. At the same time, the ifm depth vision sensor is used to tell the Galileo system to the surrounding environment. Based on this information, the system controls Xiaoqiang to avoid obstacles around him. Even if there are many pedestrians around, it has no effect on our robotic actions.
-
小强携手ifm亮相上海国际物流展发布在 蓝鲸智能大事记
2017.10.31
![0_1536226323479_上海物流展[1].png](/assets/uploads/files/1536226326624-%E4%B8%8A%E6%B5%B7%E7%89%A9%E6%B5%81%E5%B1%95-1-resized.png)
上海国际物流展是在国际物流机器人行业具有很大影响力的盛会。参展企业包含来自世界各地的大型物流公司。小强携手ifm在今年的展会上亮相啦!
参加展会的这台小强搭载了我们的伽利略视觉导航系统。首先通过遥控小强在周围移动,让小强记录下周围的环境,建立环境地图。然后在它建立的地图中通过我们的软件绘制它要移动的路线。一切设置完成之后,小强就可以按照所标记的路线行动了。同时搭载的ifm深度视觉传感器把近距离的周围环境告诉伽利略系统。系统根据这些信息来控制小强躲避周围的障碍物。即使周围有很多行人,对我们的机器人行动也并无影响。
-
小强开发平台产品常见问题(实时更新)发布在 最新公告
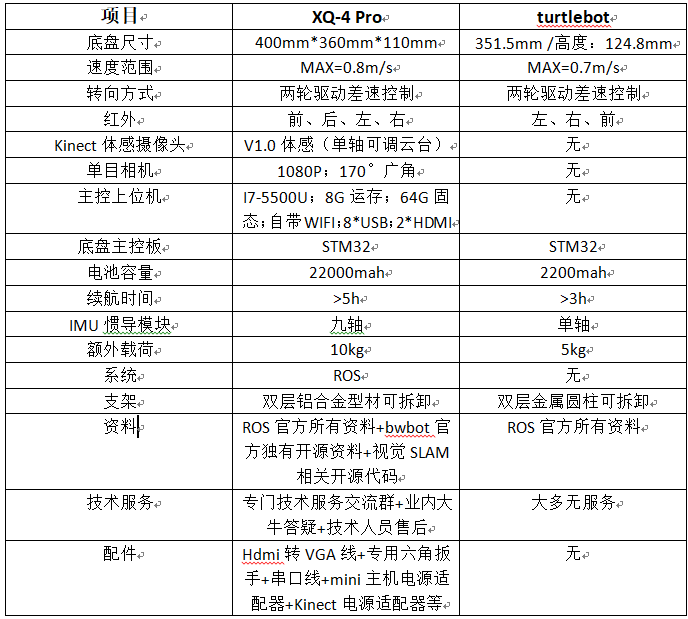
Q:小强XQ-4 Pro机器人和turtlebot有什么区别?
A:请看下表:
Q:小强机器人都可以加哪些额外的配置套餐?
A:
1、小强可以加任何支持USB的传感器(USB相机;USB温度探头;USB指纹采集模块;USB相位法红外测距模块;USB颜色传感器;USB湿度传感器;USB烟雾传感器等等);
2、可以加各种激光雷达,可以USB供电,也可以9V,12V供电,小强提供12V外接电源,还可以根据需求升降电压(自己安装电源模块)。
3、体感摄像头也可以,包括kinect、奥比中光、图漾、realsense和易福门的TOF都是经过测试可以使用的,其他体感传感器只要有相关ROS驱动即可。经过测试kinect的SLAM效果最佳,kinect v1比kinect V2效果更好。Q:为什么kinectV1 反而比 Kinect V2 效果更好呢?
A:首先为大家介绍一下kinect
Kinect是微软在2010年6月14日对XBOX360体感周边外设正式发布的名字。也就是说kinect本身是Xbox的外围设备,用途是作为传感器来进行体感游戏的,那么为很么kinect和slam技术联系在了一起呢?因为kinect可以获取景物的立体点云信息(3D模型),这样就可以进行避障和导航,所以用到了SLAM技术中,并且kinect V2的发布是为了增强体感游戏的性能体验,并不是为了SLAM技术相关的需求,而且kinectV2 去掉了V1 的单轴可控俯仰角云台,反而失去了对于SLAM来说很有用的功能,并且价格V2比V1要贵好多,所以建议使用V1.Q:小强可以加超声波么?为什么推荐配置套餐中没有超声波选项?
A:
首先声明超声波的开发并不是件难事,但现有市场上的超声波鱼龙混杂,很多低价格的普通产生波经过实测后发现根本不能有很稳定的效果,而且测距的精度也是不尽人意,但是小强实际上是支持超声波的,我们目前官方测试超声波版本为汽车使用级别的倒车雷达传超声波传感器,为了客户能够体验到最优秀的性能,我们官方没有推荐一些低价位的超声波模块,购买小强的客户很多是为了学习使用,超声波的使用没有太多的可研究价值,一些进行工程应用开发的客户也不会在乎这点价位差别而牺牲实用性能。综上,这个问题的答案是小强机器人支持超声波,具体价格可以咨询淘宝客服或者拨打官网上的销售人员电话询问,超声波目前有专用的支持ROS的扩展板,一块扩展板可以支持4路超声波,您可以按照自己的需要进行配置,和销售人员进行沟通即可。Q:小强机器人是否可以更换主控电脑?
A:小强的主机和底层控制单元为串口通讯,一根USB串口线连接。如果自己的板卡或者电脑支持USB的话就可以更换,但是需要自己配置相关驱动和通讯协议。另外小强机器人不单独售卖底盘,即使自己更换电脑仍然需要购买小强机器人官方套餐,为了客户稳定的开发,我们决定保留电脑,而且提供远程登陆主机桌面的开发方式的教程,这样的话就能在不用外接显示器的情况下进行开发,比安装自己的笔记本更为方便,小强配置的电脑均为SSD固态硬盘,顶配更是i7-5500U CPU+8G运存,可以说性能已经非常高了,基本没有必要更换自己的电脑。Q:可以开发票么?开成多张?开成小车的零部件?
A:我们为机器人的唯一厂家,可开增值税专票和普票,税点目前统一为4个点,含税价格为总价格*1.04来计算,由于公司主营业务范围允许,我司可以开具相关零部件明细发票,具体要求请与公司销售人员联系,在公司官网下面可以找到,网址:www.bwbot.org.Q:机器人可以定制么?
A:目前机器人的状态为两轮驱动两轮从动的四轮结构,少数客户也许需要更换底盘驱动方式、更换电机类型、更换主控甚至定制外观,这些服务我们均可提供,但是会根据相关材料费用和工时费用进行报价,需要联系公司销售人员进行询价。销售人员联系方式可以到我司官网最下面找到,网址:www.bwbot.org。Q:视觉导航相比激光雷达有什么优势?
A:视觉导航分为单目视觉和双目视觉,单目视觉的硬件要求低,算法难度大,双目可以通过双目效应实现景物的3维建模,但是双目算法的精度较低,无法达到小规模自主导航要求,所以除了避障的因素之外,光是导航的话单目视觉具有成本低,精度高等优势,我们主要使用单目视觉方案进行导航定位,那么激光雷达的话如果较大范围的场地,比如说15M以上的场地激光雷达普通的几乎无法使用,需要上万的激光雷达传感器才可以满足,如果要是百米范围的扫描,激光雷达更是需要十万价位的才可以满足,激光雷达和视觉同样会受室外光线影响,视觉对光线的敏感度较高,我们现在推出了普适性的解决方案,包括室外曝光度自动调节算法,光纤方向遮挡,夜晚红外补光等等,可以适应各种场地和实况,视觉导航不但可以识别近在眼前的各种物体的特征,更是可以分辨出百米之外的景物特征点,而且只是用分辨率1080P的摄像头,成本极低,视觉导航更是可以和人脸识别,视觉跟随,智能识别,辅助驾驶,AI等领域直接结合,是机器人将来的主流技术,不但具有很高的科研价值,还具有广泛的市场价值。Q:买小强机器人有没有技术支持呢?
A: 我们公司有专门的技术支持人员,在我们的技术交流群中,更是有很多业内大牛进行实时答疑,此外,我们的论坛(community.bwbot.org)有电子版的教程几十篇,涵盖视觉导航、激光雷达slam、kinect、机械臂控制、手柄控制、App、IMU惯性导航等等相关独有资料,在ROS上的所有开源资料小强全部支持,此外,我们还有开源代码库(https://github.com/BlueWhaleRobot),教程里面提到的所有项目的开源代码都在上面供您参考,这些技术服务其他平台很慢满足,可以说我们的技术服务已经是很完善的了。Q:小强发货是散件还是整机?
A: 小强机器人发货是整机发货,但是为了邮寄安全因素考虑,小车的二层平台是有八个螺丝需要到货后安装避免运碎,发货前各个传感器和各项功能都会被我们的技术人员测试一遍之后才会出货,小强的寄送均为顺丰寄送,运费无需客户承担。Q: 小强关于激光雷达和视觉导航功能是开源的么?
A: 在教程中展示的功能的源代码都可以在我们的github网站上查找到,但是伽利略视觉导航系统的所有代码都是不开源的,小强平台是提供给开发学习者使用的,代码也是仅供学习参考,不得应用在商业领域进行牟利。只要是没有在我们官方网站、论坛和github上面公开的代码均为不开源代码,并且蓝鲸智能机器人拥有自主知识产权。Q: 小强机器人的资料在哪里可以找到?
A: 小强机器人有详细的教程,在我们网站上可以直接阅读或者下载,网址是:https://www.bwbot.org/zh-cn/ 进到网站后然后选择资料中心—>小强ROS机器人用户手册。也可以在论坛里面找到,先打开论坛地址:https://community.bwbot.org/—>产品服务—>小强机器人用户手册和教程目录。小强的每一篇教程都是有开源代码参考的,开源代码在我们的github里面,地址是:https://github.com/bluewhalerobot欢迎继续咨询,我们还将整理出更多的常见问题进行归类解答,方便大家。
-
小强用户可以免费使用伽利略单目视觉导航系统发布在 最新公告

2018年6月14日晚开始,蓝鲸智能机器人研发的单目视觉导航系统“伽利略视觉导航系统”对于小强用户免费开放。伽利略系统是蓝鲸智能机器人开发的一个视觉导航系统。视频展示 http://www.bwbot.org/static/video/nav2.mp4
现在所有小强用户都可以免费使用了。详细信息可以看这里 https://community.bwbot.org/topic/488。欢迎大家使用和提意见。
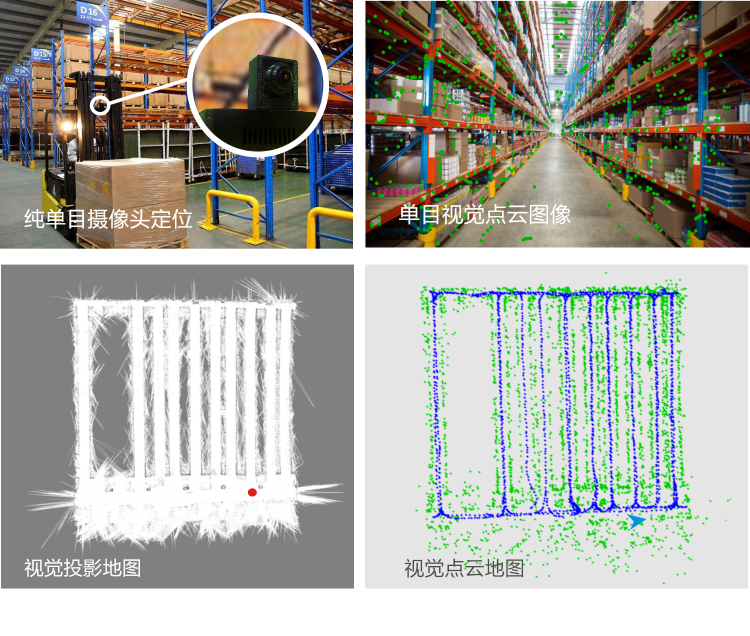
小强链接https://item.taobao.com/item.htm?id=527426530377伽利略视觉导航系统利用廉价的cmos rgb摄像头采集机器人视野内图像,通过连续多帧图像中的特征点信息来计算机器人当前姿态,同时建立三维视觉导航地图。地图建立之后,通过对比当前图像的特征点与地图中的特征点,伽利略视觉导航系统可以持续快速输出机器人在地图中的实时位置。机器人路径规划模块根据这个实时位置信息控制机器人完成预设动作,从而实现机器人的自主无轨运动。
伽利略视觉导航系统的主体功能是视觉导航地图的建立更新、机器人实时定位。对于机器人的运动控制,客户除了可以自行开发也可以使用我们附带提供的路径和运动规划ROS程序包。ROS(Robot Operating System)是业界最通用的开源机器人操作系统,它基于linux电脑操作系统,定义了各种机器人传感器数据传输协议和格式标准,它也提供一系列开源工具包。类似手机安卓系统的app,采用ROS开发的程序包可以方便地在不同机器人硬件平台转移部署。
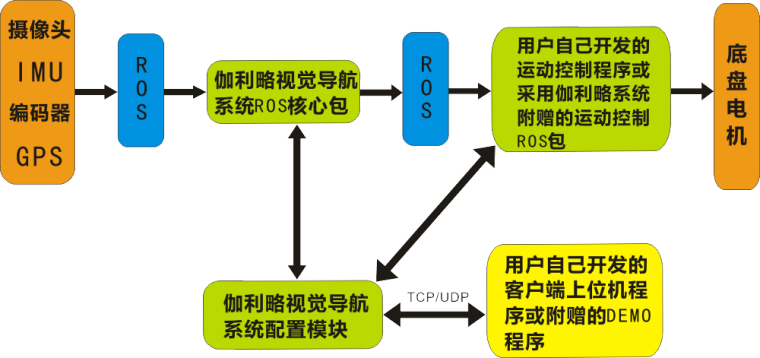
摄像头和其它机器人传感器接入ROS系统转换成ROS标准格式数据,这些数据经过伽利略视觉导航系统ROS核心包处理后得到机器人位置和地图,机器人位置和地图接着也传入ROS封装成ROS标准格式数据。机器人运动控制程序通过ROS可以获取机器人位置和地图数据,配合控制策略得到底盘电机控制量,从而完成机器人的自主移动任务。
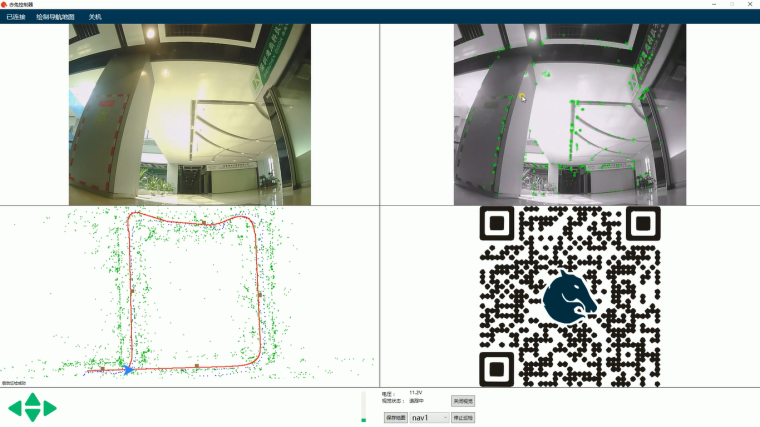
客户端程序通过网络接口调用伽利略视觉导航系统的配置模块,可以获取机器人位置用于界面显示,也可以上传和下载地图、触发导航系统的开启与关闭,还可以配置导航系统的各项参数。
实际场景应用:
极端场景测试:
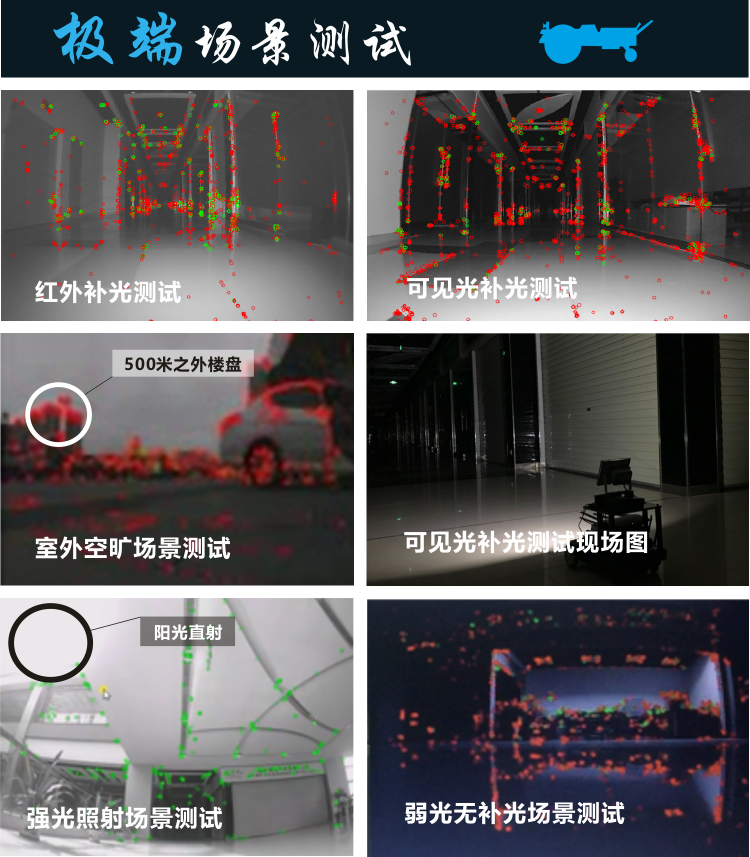
除了小强用户可以免费使用之外,伽利略系统也可以单独购买,可以直接登陆我们官网联系销售人员咨询。

-
“守寡式职位”发布在 杂谈
守寡式职位产生
19世纪末期,世界航海业蓬勃发展起来。西班牙有一位叫大卫的船长,经营着一个巨大的航运集团,控制了通往世界各国的许多航线。

在他的航运集团中,有一艘运量最大的船“莎丽号”,承担着整个集团重要的航运任务,也是整个集团的王牌船舰。但是令大卫苦恼的是,莎丽一直找不到一位合适的船长来主导它。大卫曾出重金从航运界中挖了几位经验丰富、有口皆碑的船长来主持莎丽号,但是奇怪的是,每一位船长在上任莎丽号最高执行官一职后都失败了,他们以前在其他船队中骄人的能力表现在这里遭到了严酷的挑战——虽然船长们出尽浑身解数,但是莎丽号的经营业绩仍直线下降。大卫苦苦思索了许久,终于想通了一个事实:不是船长们的能力不行,而是职位设计本身存在缺陷。这个职位就像一个巨大的黑洞,任何一个踏上此职位的人都逃脱不了失败结局的命运,后人就将此种无人可以胜任的职位称为“守寡式职位”。
守寡式职位的出现并非只是19世纪才存在的事,环视当今许多公司,包括业界一些著名的大公司,仍然存在着这种守寡式职位的困惑。职位设计的错误
在管理学大师杜拉克看来,企业之所以会形成守寡式职位,肇因在于职位的设计上有以下几种常见的错误:

一、 职位设计时涵盖太小,使优秀人才无以成长和发展。
一项管理职位可能是一项所谓的“终点职位”——在职人员可以在此职位上经营一辈子。但如果管理职位设计太小,当事人只须若干年都能学会一切,不费力地完全职位的目标,他们不免感到失望,继而怠倦。庸人会继续留在职位上逍遥过日子,而优秀人才大多则会选择离开,到某个更能体现其价值的地方去。
二、 职位设计的另一项错误,是该职位称不上是一个职位,而只是一个“副手”的职位。
职位必须有其特定的目标,必须有其特定的职能,职位的领导者必须拥有充分的权力可以在其职能范围决定一切,以达到目标。然而副手往往是上级命令的执行者,其本身职能何在,目的何在,通常很难界定。他仅仅是一位助手,主管要他做什么,他才能做什么。
三、 管理人在位却无专业之事可做
我们经常听到对管理人的责难,说其未能完全授权,通常那是因为管理人本身的工作太少,所以才做了许多本该部属做的工作的缘故。一个职位的设计如果令在职者无实际专业工作可作,是一件极为危险的事情。这不仅是会毁掉此职位上的执行者的工作积极性,更严重的是会影响到其他与此职位相关的其他人的工作。
四、用职衔来作为对人的奖励
某些不足百人的小公司,有着“总监”、“经理”、“总裁”着大职衔的人多不胜数,“官”的人数比“兵”的人数多几倍。许多有着大职衔的人其工作的实质其实未变,公司却以此来作为对员工的一种奖赏——奖他们一顶高帽子。一些二十出头的年轻人,在公司不用两年,就纷纷被挂上听起来吓死人的大职衔。其实这样做的结果有点类似于涸泽而鱼——职衔与薪酬一样,是激励员工上进的一种非常有效的手段。然而,员工太轻易就可以得到此等职衔的奖励,一旦薪酬产生边际效益递减的效应,他们会觉得公司已经失去吸引力,因为他们在此已无追求的目标。

总结
在许多企业的习惯性观念中:职位是固定不变的,只有人迁就某个职位,而不可能让职位来迁就人,其实这是错误的。一个设计合理的职位既是有着明确的责任目标,也有着一些灵活变动的指标来适应每一个履任的人,使其能最大限度地发挥自己的才能。职位人性化的设计正成为一些著名企业的做法。
一个好的管理职位,应以任务为基础;使管理人应力求达成其任务,以达成公司的目标。管理人的职位,必须是一个“真实可见的”的职位——人人可以由此职位看出其重要性,看出其对公司的贡献。管理人的职位,工作内容应尽量宽阔,而不宜范围狭窄,职权薄弱。