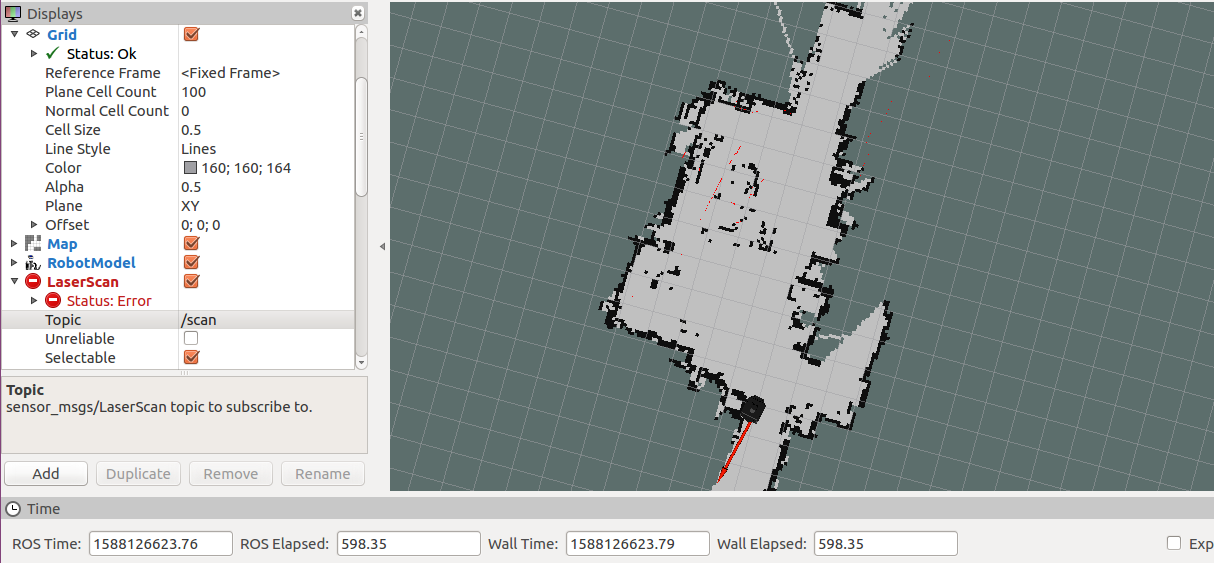
@山中客 问题定位到了,关键提示:Fixed Frame [map] does not exist.
小强配置的frame id是[map_laser], 之前改过调试的时候这个地方给改成了map,导致rviz回放转换地图失败了。
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
山中客 发布的帖子
-
RE: 小强ROS机器人教程(16)___大范围激光雷达slam与实时回路闭合测试发布在 产品服务

-
RE: 小强ROS机器人教程(16)___大范围激光雷达slam与实时回路闭合测试发布在 产品服务
@xiaoqiang 在 小强ROS机器人教程(16)___大范围激光雷达slam与实时回路闭合测试 中说:
一切正常的话,现在可以看到下图的类似效果,等待bag包play完
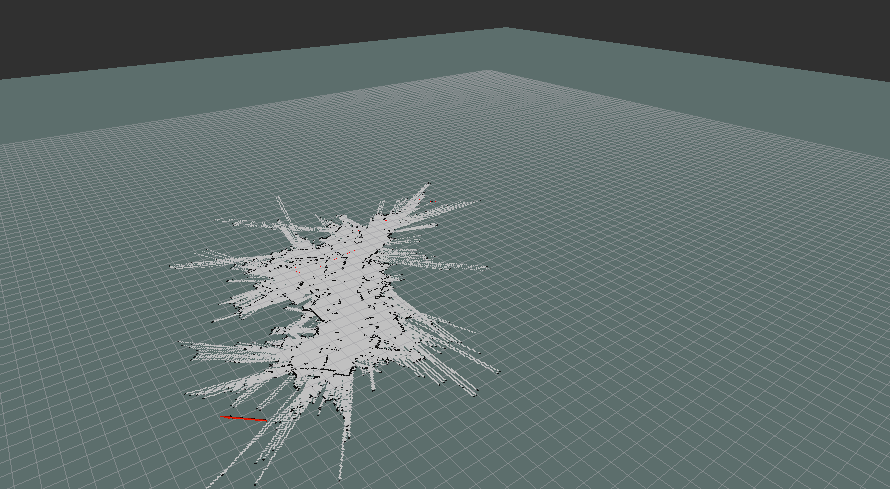
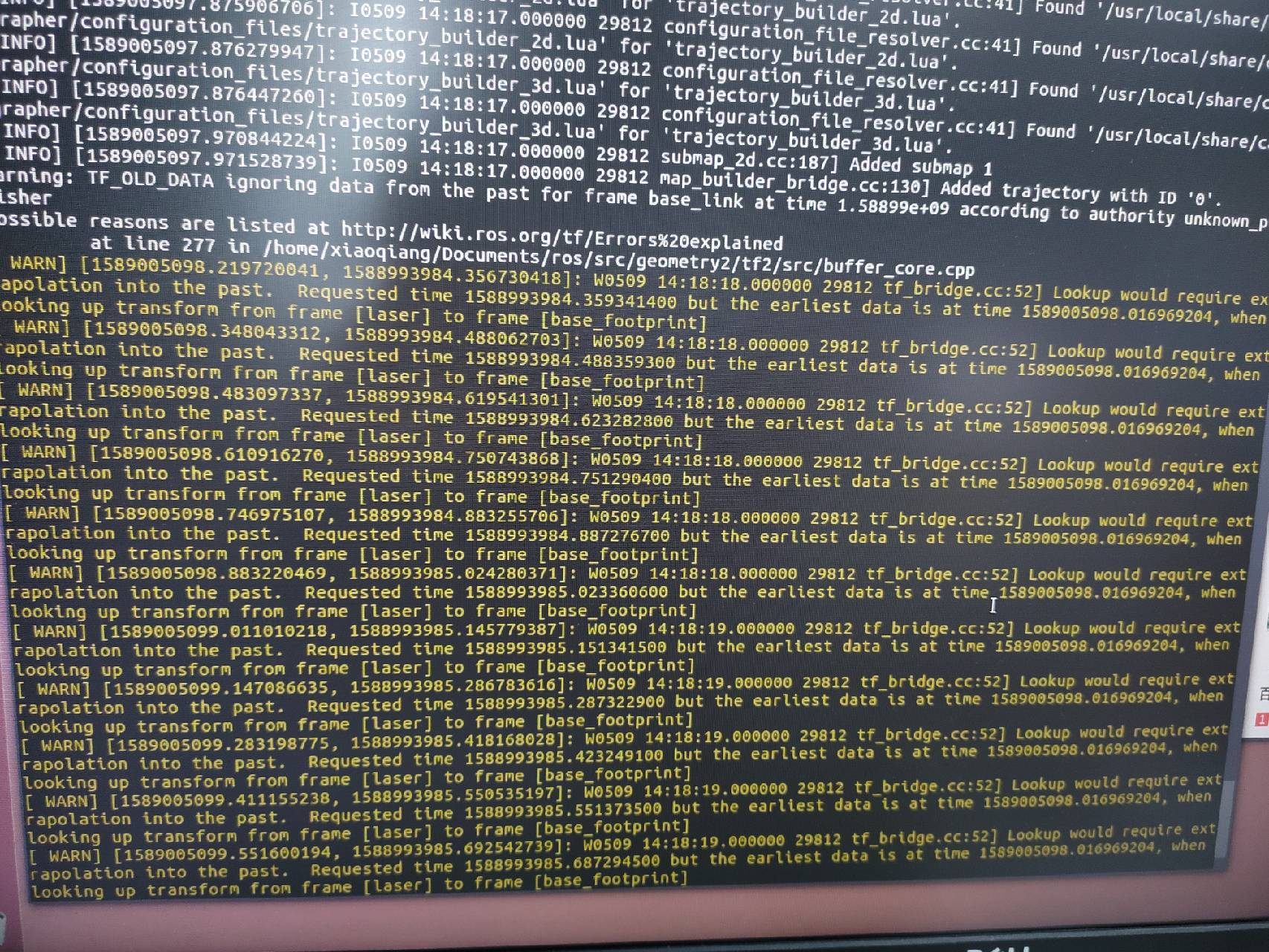
回放建图失败了。如图rviz显示和log:

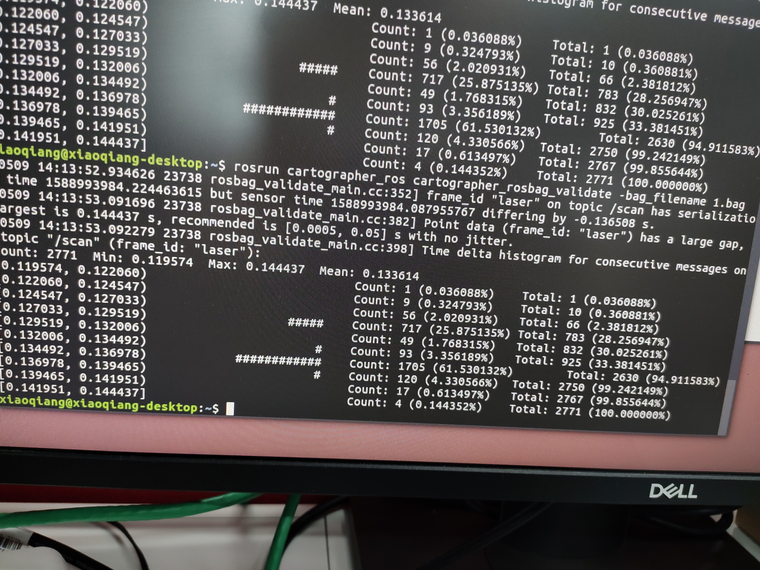
bag有效性检查,有如下提示:
不知道问题出在什么地方,另外我使用的小强雷达是倒着装的(雷达沿x轴旋转180度),能否帮忙看看,谢谢!
-
RE: google激光雷达slam算法Cartographer的安装及bag包demo测试发布在 产品服务
@frank 确实是并行的job 过多导致编译时内存占用过大。

如果make -j不指定参数,默认是不限制job数,即能并行多少就并行多少。
-j [jobs], --jobs[=jobs]
Specifies the number of jobs (commands) to run simultaneously. If there is more than one -j option, the last one is effective. If the -j option is given without an argument, make will not limit the number of jobs that can run simultaneously.
-
RE: 小强ROS机器人教程(16)___大范围激光雷达slam与实时回路闭合测试发布在 产品服务
@xiaoqiang 在 小强ROS机器人教程(16)___大范围激光雷达slam与实时回路闭合测试 中说:
rosbag record /scan
bag包只需要录制激光雷达的数据就够了吗?然后直接交给cartographer 就可以回放制图了?
如果这样的话,是不是用小强的bag包也可以在另外的PC上回放制图呢?谢谢。
-
RE: google激光雷达slam算法Cartographer的安装及bag包demo测试发布在 产品服务
@xiaoqiang 在 google激光雷达slam算法Cartographer的安装及bag包demo测试 中说:
4.安装cartographer
这一步的编译总是报虚拟内存不够的错,已经开到20G了,现在编译卡死中。
有没有别的方法能绕过去?如果完全按照官方的方式安装cartographer 能兼容小强的demo 吗?
谢谢。
-
RE: 小强AMCL导航,可以自主定位吗?为什么rviz里每次都需要手动定位(2d pose estimate)才可以?发布在 激光雷达
@Yangoogle 感谢提示,现在正在学习和调试slam 和导航的技术,计划是从激光slam 入手,后面再搞vslam.
-
RE: 小强AMCL导航,可以自主定位吗?为什么rviz里每次都需要手动定位(2d pose estimate)才可以?发布在 激光雷达
感谢回复,如果考虑具体的产品实现,amcl导航的初始定位就必须借助其他算法或方案来完成,是吗?
常见的处理方式有哪些?
-
小强AMCL导航,可以自主定位吗?为什么rviz里每次都需要手动定位(2d pose estimate)才可以?发布在 激光雷达
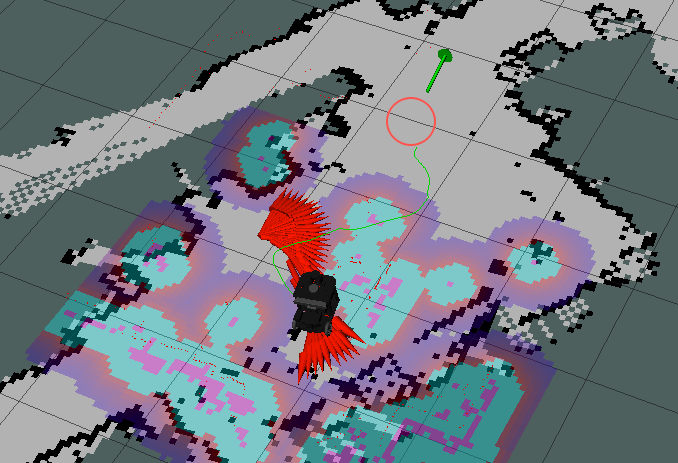
如图,如果在rviz里没有手动定位,小车模型在rviz里的初始位置无法自动定位,
而且指定目标点后,实际上小车已经移动到了指定的红圈位置。但小车模型在rviz的位置还是错的。请帮忙看看哪里有问题?谢谢。
-
RE: 为什么小强gmapping 建图清晰度不够?附图发布在 激光雷达
@frank 在 为什么小强gmapping 建图清晰度不够?附图 中说:
@山中客 这种安装反向和普通180度反向是不一样的,雷达旋转方向变了,逆时针和顺时针的区别。除了修改tf 还需要设置rplidar驱动launch文件中的inverted参数http://wiki.ros.org/rplidar
实测了一下,雷达转向反转后,反而会出问题,具体原因还没想明白。
-
RE: 为什么小强gmapping 建图清晰度不够?附图发布在 激光雷达
@weijiz
嗯,考虑上下反了的话,与小强默认tf配置,x轴y轴应该不变,z轴应该降低了10公分。
然后是延x轴旋转180°。请帮我看一下,最终tf 参数是不是改成这样?
node pkg=“tf” type=“static_transform_publisher” name=“laserlink_broadcaster” args=“-0.20 0 0.2 0 0 3.1415926 base_link laser 100”/
谢谢。
-
RE: 为什么小强gmapping 建图清晰度不够?附图发布在 激光雷达
另外我的虚拟机环境,执行rviz 时,会有以下警告,但能够正常显示。
~/Documents/ros$ rviz
[ INFO] [1588045999.551674864]: rviz version 1.12.17
[ INFO] [1588045999.551726648]: compiled against Qt version 5.5.1
[ INFO] [1588045999.551747545]: compiled against OGRE version 1.9.0 (Ghadamon)
[ INFO] [1588045999.777426074]: Stereo is NOT SUPPORTED
[ INFO] [1588045999.777508057]: OpenGl version: 3 (GLSL 1.3).
[ERROR] [1588046006.188003574]: poll failed with error Interrupted system call
[ERROR] [1588046006.188341042]: poll failed with error Interrupted system call
[ERROR] [1588046006.191308788]: poll failed with error Interrupted system call
[ERROR] [1588046006.192157501]: poll failed with error Interrupted system call不知道有没有影响?
谢谢。
-
RE: 为什么小强gmapping 建图清晰度不够?附图发布在 激光雷达
@weijiz 在 为什么小强gmapping 建图清晰度不够?附图 中说:
看看里程计准不准还有雷达有没有装反
感谢回复。
怎么确认里程计是否准确?需要做校准工作吗?
我使用的是小强pro,雷达已经安装好了,应该不会装反吧?再附发一张小强的照片。正面
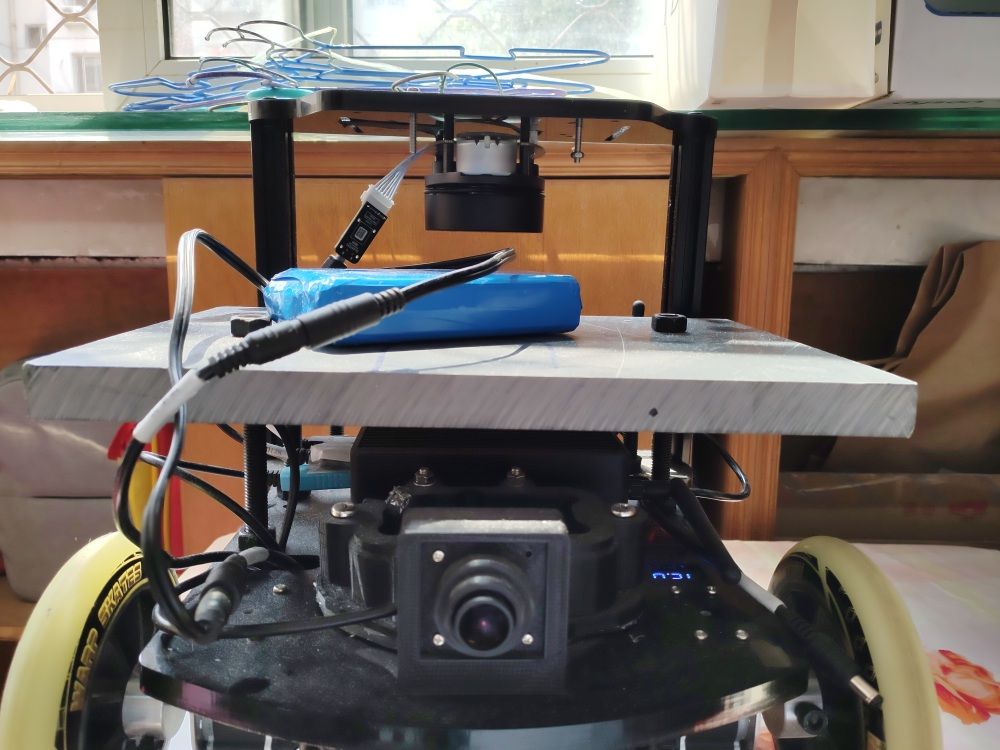
侧面

-
RE: 求助:教程(18)无法找到dso_live (已结帖)发布在 ROS教程
@山中客 在 求助:教程(18)无法找到dso_live 中说:
Pangolin X11: Failed to open X display
Aborted这个原因找到了,最后的Pangolin X11: Failed to open X display
Aborted (core dumped),是由于在ssh 下pangolin 无法显示图像。整个问题实际上在重编ROS 后解决的,另外dso_ros dso_live 不能通过ssh 执行,需要直接在小强主机或VNC 环境下执行。
问题close.
-
RE: 求助:教程(18)无法找到dso_live (已结帖)发布在 ROS教程
删掉ros/build 目录后,重新编译,
再次执行rosrun dso_ros dso_live, 错误类型变成了:
could not parse argument “mode=1”!!========================================
loading calibration from /home/xiaoqiang/Documents/ros/src/dso_ros/camera.txt!
could not parse argument “mode=1”!!
MODE WITH CALIBRATION, but without exposure times!
Reading Calibration from file /home/xiaoqiang/Documents/ros/src/dso_ros/camera.txt … found!
found RadTan (OpenCV) camera model, building rectifier.
Creating RadTan undistorter
Input resolution: 640 480
In: 367.720384 369.850464 312.163378 222.327969 -0.302804 0.080163 0.001972 -0.000586
Out: Rectify Crop
Output resolution: 640 480
finding CROP optimal new model!
initial range: x: -1.1532 - 1.2409; y: -0.6982 - 0.8408!
iteration 00001: range: x: -1.1475 - 1.2347; y: -0.6982 - 0.8408!
iteration 00002: range: x: -1.1417 - 1.2285; y: -0.6982 - 0.8408!
iteration 00003: range: x: -1.1360 - 1.2224; y: -0.6982 - 0.8408!
iteration 00004: range: x: -1.1360 - 1.2224; y: -0.6947 - 0.8366!
iteration 00005: range: x: -1.1360 - 1.2224; y: -0.6912 - 0.8324!
iteration 00006: range: x: -1.1360 - 1.2224; y: -0.6912 - 0.8324!Rectified Kamera Matrix:
270.95 0 307.8
0 314.369 217.307
0 0 1NO PHOTOMETRIC Calibration!
Reading Photometric Calibration from file
PhotometricUndistorter: Could not open file!
using pyramid levels 0 to 3. coarsest resolution: 80 x 60!
START PANGOLIN!
terminate called after throwing an instance of ‘std::runtime_error’
what(): Pangolin X11: Failed to open X display
Aborted (core dumped)