ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
如何修改超声波launch文件中每个超声波的 tf 值?
-
淘宝购买了蓝鲸的超声波产品后看到bw_sensors.launch这个文件中有设定每个超声波的 tf 值, 例如:
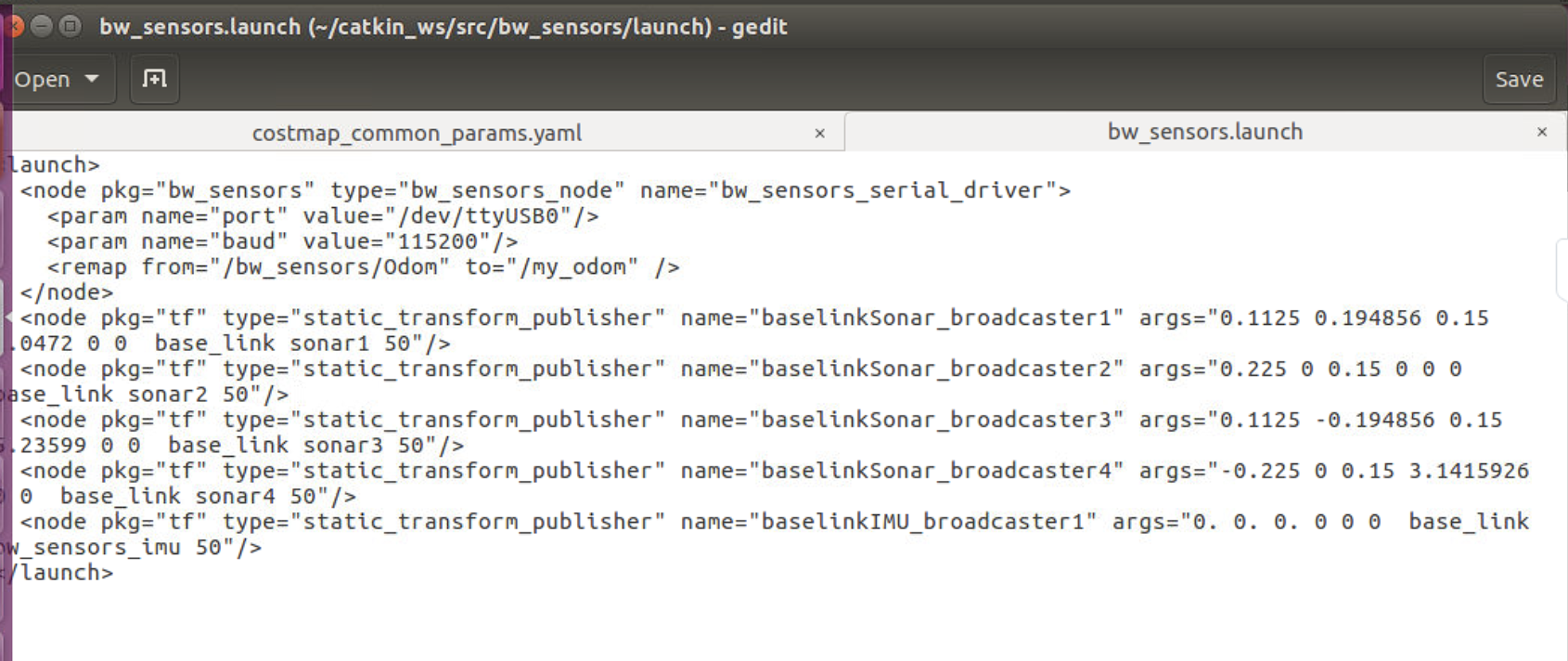 。
。想问下这个tf值是怎么算出来的?这需要根据自己小车的床长宽高进行修改吗?谢谢!
-
@weijiafeng 你好,我也正在研究这方面的,请问可以加个QQ交流交流吗?1196814206
-
@Lip0 你好,微信吧 - maggie_weijia_feng
-
@weijiafeng 是的,根据安装位置用尺子量出对应位置,超声波到机器人baselink的坐标变换,具体参数含义可以看static_transform_publisher的文档。
-
@weijiz 谢谢!还想问下 - 如何判断超声波的tf值已改正确?如果不正确的话小车运动过程中会出现什么情况?- cost map超声波层的障碍物定位不准?
-
@weijiafeng 是的。超声波本身就不是很准确的传感器,有一定的扩散角度。一般只是作为触发信号,很少用来在costmap里面避障。
-
@weijiz 哦哦,什么叫触发信号?那做避障的话除了激光雷达一般再加上视觉来做吗?视觉一般是用单目还是深度摄像头比较多?
-
@weijiafeng 雷达+超生已经可以了,深度摄像头可以用来避障,单目用来导肮
-
@Yangoogle 哦哦好的。那什么叫触发信号呢?如果超声波和深度摄像头一起做避障,各自辨别的障碍物分别有什么特点呢?激光雷达也做避障吗?
-
@weijiz 我想问传感器向ROS发布数据的频率在哪里设定?你们家的超声波产生数据的频率是多少?是不是发布数据频率的设定的值越高costmap就越精确?不高于超声波产生数据的频率
-
@weijiafeng 发布频率应该是不能设置的,这个是驱动发布的
-
我想问一下,如果激光雷达结合超声波避障,超声波数据怎么处理?我之前把超声波加入costmap里面,避障效果很差,不能避开障碍物。
-
@terminal 超声波当作红外传感器处理。比如放在前方的超声波距离小于某值就停止前进。放在后面的超声波距离小于某值就停止后退。