@frank 在 請教 BW-DR03 轮毂电机驱动器 DiffDriverController.cpp 程式原碼的原理? 中说:
以看成是最小速度过滤,你可以删掉
謝謝
@frank 在 請教 BW-DR03 轮毂电机驱动器 DiffDriverController.cpp 程式原碼的原理? 中说:
百度“差速小车控制原理”
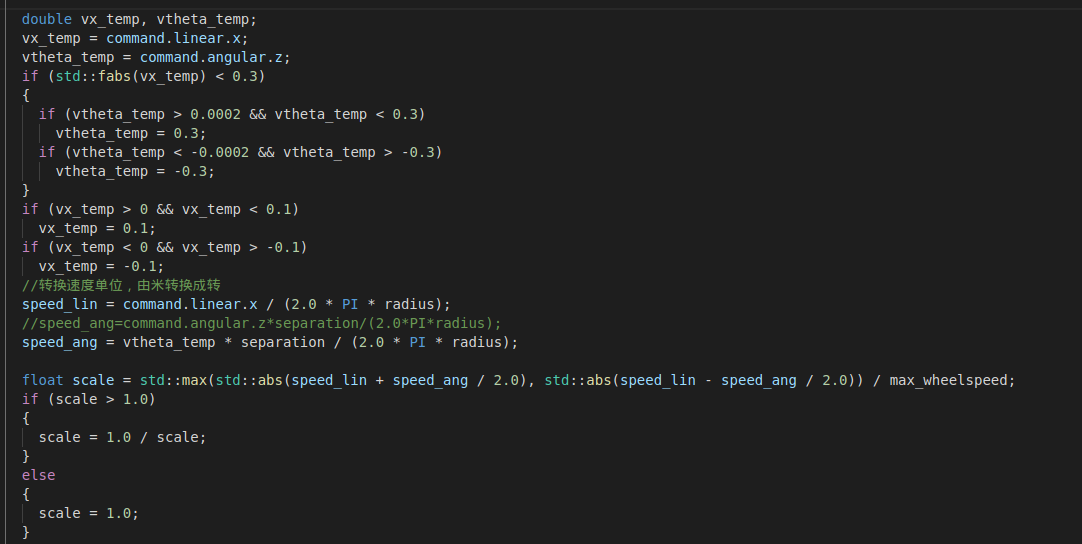
你好,我知道“差速小车控制原理”,請問為何vx_temp<0.3 時要連帶判斷vtheta_temp>0.0002&&vtheta_temp<0.3
你好:
請問 DiffDriverController.cpp 程式原碼 中 以下這一段的原理是什麼?
BWBO 公司你好,
我買了貴公司的輪轂馬達驅動器,我的應用是 差速機器人,我也跟貴公司買了超音波感測器及紅外線感測器,因為在github 上xqserial_server有很多branches,請問依我的應用,該用那一種?
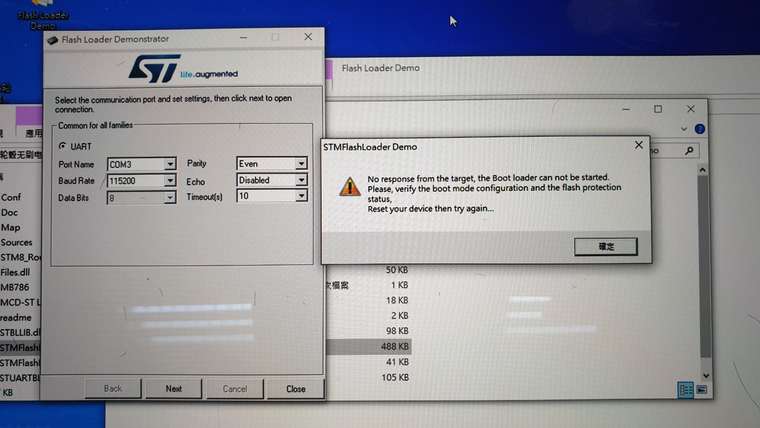
使用BW-DR03 於 ROS 端下達控制命令 /cmd_vel topic 給BW-DR03 ,使用轉速計量測輪子轉速與/cmd_vel 給的轉速命令差異太大,輪子實際轉速太大,使用 xqserial_server lungu branch
或是 以下 這顆 8寸200*60电动滑板车无刷带霍尔电机电动车24V36V48V500W轮毂电机
https://item.taobao.com/item.htm?spm=a230r.1.14.56.416e3e2esmdbp4&id=544906210515&ns=1&abbucket=20#detail
例如 以下 這顆 中菱科技8寸直流无刷轮毂伺服电机24-48V驱动器内置编码器马达
https://item.taobao.com/item.htm?spm=a312a.7700824.w5003-22389250146.1.125d6e06opYhLf&id=553242579668&scene=taobao_shop