@weijiz 这个虚拟机镜像的开机密码是啥?密码输入xiaoqiang不对呀
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
potterson 发布的最新帖子
-
RE: 运行roslaunch nav_test xiaoqiang_a2_demo_amcl.launch告警,rviz导航地图无法打开,请问如何处理?发布在 激光雷达
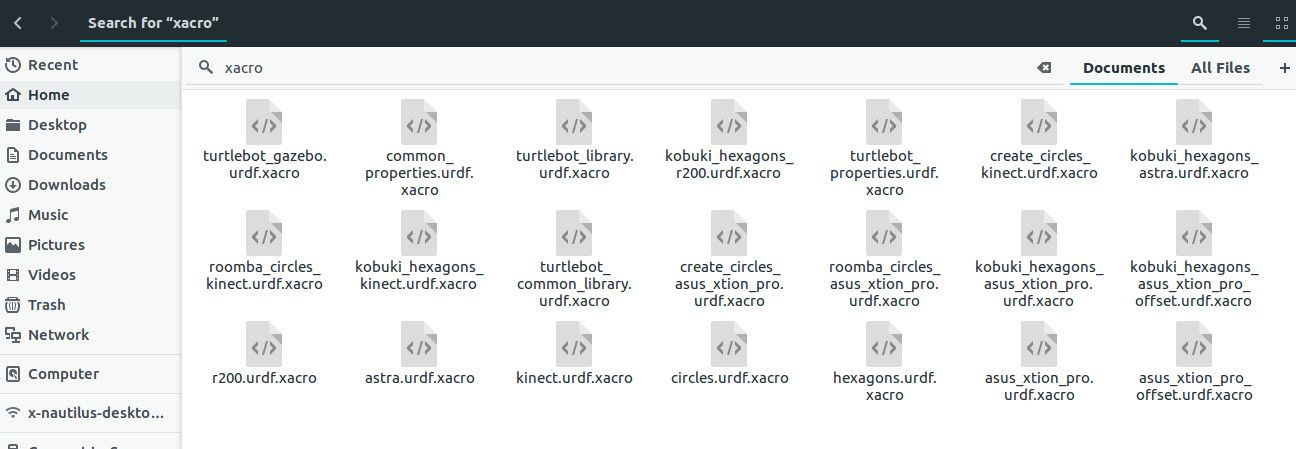
@小助理 src下没找到xacro目录,搜到一些xacro文件,您看需要修改哪个?

-
RE: 运行roslaunch nav_test xiaoqiang_a2_demo_amcl.launch告警,rviz导航地图无法打开,请问如何处理?发布在 激光雷达
@小助理 在 运行roslaunch nav_test xiaoqiang_a2_demo_amcl.launch告警,rviz导航地图无法打开,请问如何处理? 中说:
调整传感器的坐标
请问如何调整传感器的坐标?地图范围应该没问题,在其它车上验证过。
-
运行roslaunch nav_test xiaoqiang_a2_demo_amcl.launch告警,rviz导航地图无法打开,请问如何处理?发布在 激光雷达
运行roslaunch nav_test xiaoqiang_a2_demo_amcl.launch告警,rviz导航地图无法打开,请问如何处理?
The origin for the sensor at (3003157225420727803220224981692559776537027727691404545041178396499785393978843913342413606735376014949151355769129225088558533013362331526068599030463966998271373989226878530370877182001315956206515660519202920477811108800108522988904538433096835163563824685580549220687180749340672.00, -0.00) is out of map bounds. So, the costmap cannot raytrace for it.