ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
reznov 发布的最新帖子
-
香橙派5写入官方rkspiloader后无法正常启动/启动后mac地址每次重启随即变化发布在 技术交流
问题描述:
香橙派5主板更新到v1.3.2后,原先可用的loader写入后,在RK_DEV_TOOL中出现“无法切换到pcie存储”的错误输出,与官方人员对接后几天后并未解决,使用官方镜像仍旧无法正常启动。解决办法:
https://launchpad.net/~jjriek/+archive/ubuntu/rockchip/+sourcepub/16218399/+listing-archive-extra
下载非官方loader写入spiflash,问题解决。
-
RE: 小强RQ4-Pro Kinect V2相机频繁断连发布在 产品服务
@kardel_young dmesg日志的内容里看不出更多东西了。从硬件层面考虑的话现在只剩下Kinect本体没有排查,可以试试插在自己的windows电脑看工作是否正常。
-
RE: 伽利略系统连不上小车发布在 技术交流
@httttt 如果没有编译成功,解决galileo_data_display依赖安装失败的问题再编译;如果编译完成,手动上面的startup再次查看报错。
-
如何重装xiaoqiang系统镜像发布在 产品服务
-
下载镜像(依照之前使用过的系统版本,选择对应的系统镜像下载)Ubuntu20.04系统的用户可使用该镜像 小强新版本系统通用镜像 ;
-
准备一个16G以上的U盘,利用镜像制作启动U盘。可以使用 UltraISO软碟通 来制作。如何制作制作启动U盘 该链接末尾介绍了如何使用软碟通制作启动U盘,这里不再赘述;
-
将制作好的U盘插入到xiaoqiang主机的usb3.0(蓝色)借口上,连接好显示器和键盘鼠标以及开机电源;
-
按下开机键,等待出现
或者只有上面三角形图标时,多次点按键盘del键或esc键直至进入如图所示BIOS;
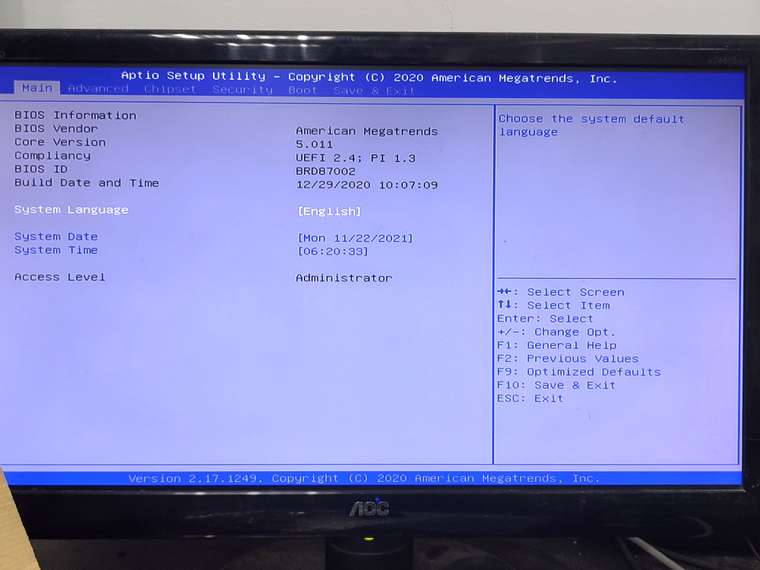
使用键盘方向键移动至如图为止,并使对应位置亮起,然后按下回车键;
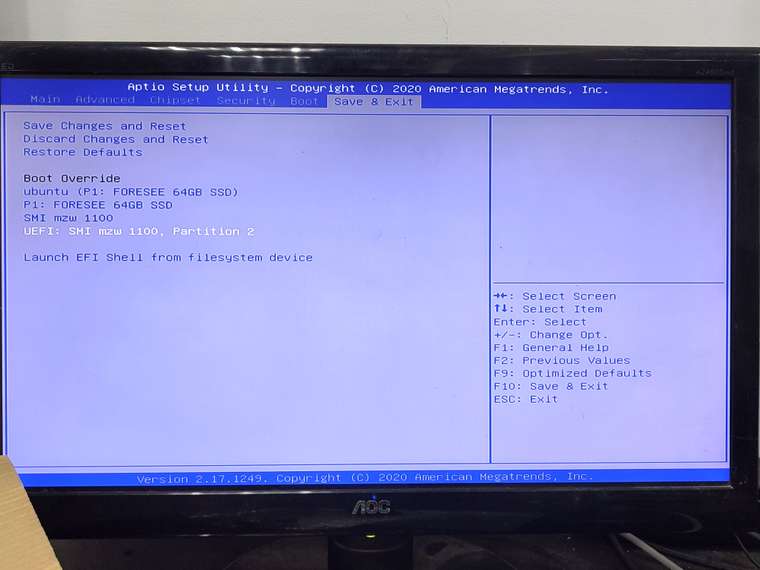
(由于每个人使用的U盘型号不同,具体选择的Boot Override请以实际情况为准,但必须选择前缀带有UEFI的) -
进入重装环节。使用方向键控制上下移动,选中第二项并亮起后按下回车键。
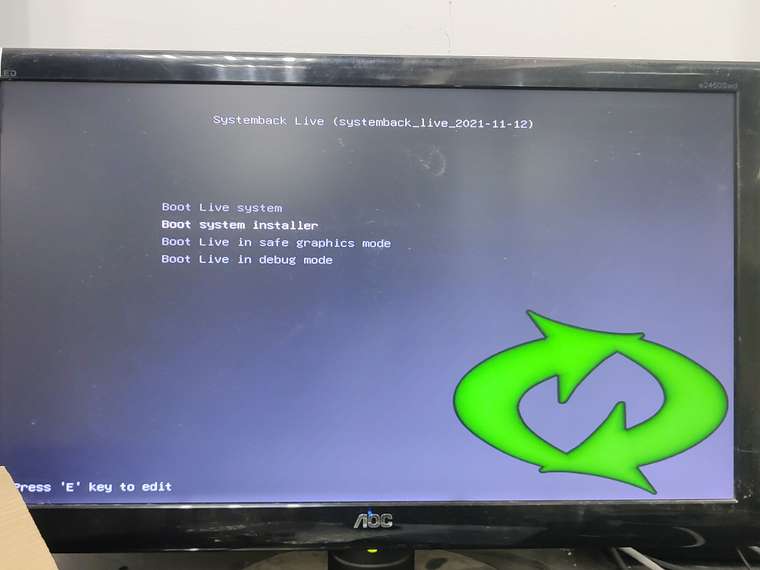
然后屏幕会变黑,需要等待一段时间,之后屏幕再度亮起并出现如图所示内容。此时需要填写hostname以及密码,密码建议使用xiaoqiang,hostname必须使用xiaoqiang-desktop。点击Next进入下一步;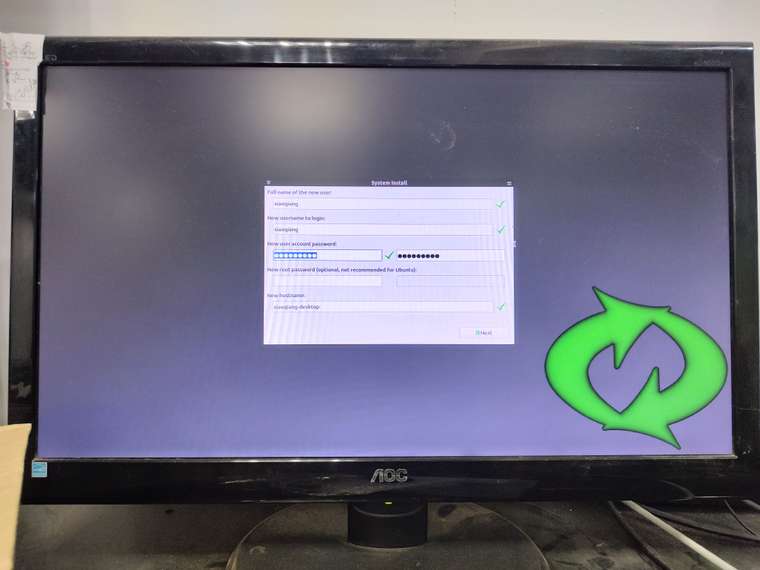
-
点击并选中第一项,然后按下右边的Unmount以及Delete(上方是xiaoqiang主机硬盘,下方是插入的U盘,请勿选错)
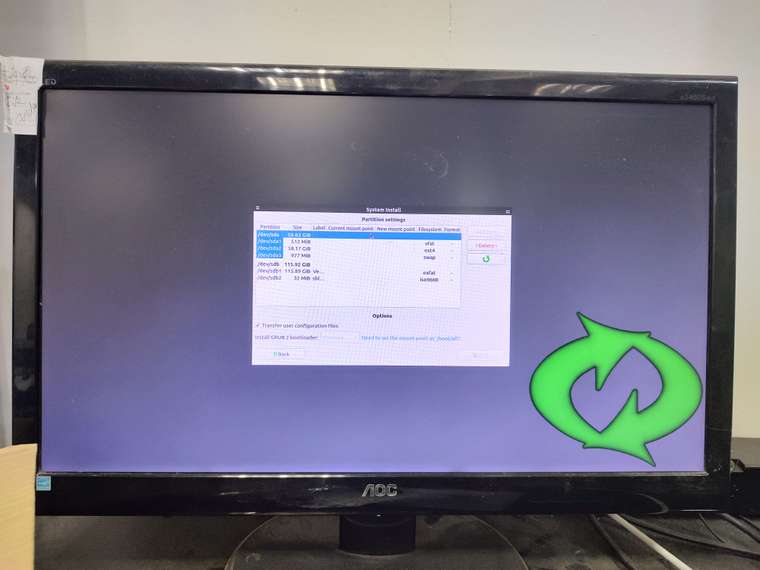
此时界面变为如图所示,然后选择第二项,将右上方的数字改为1024,点击“←”
以此类推,在分配一个4096MB的,接下来的剩余空间无需分配,直接点击“←”。接着回到刚刚分配的1024,点击右方的Mount point选择/boot/efi
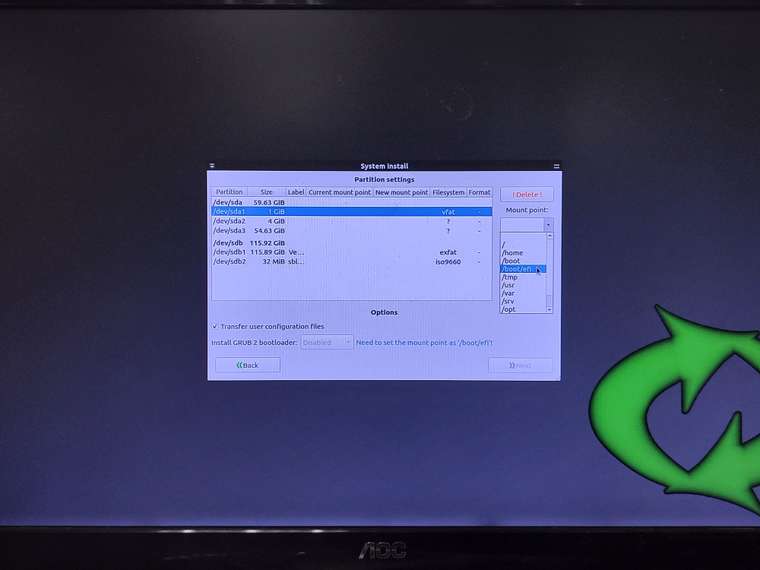
依次将剩余两个改为如图所示Mount point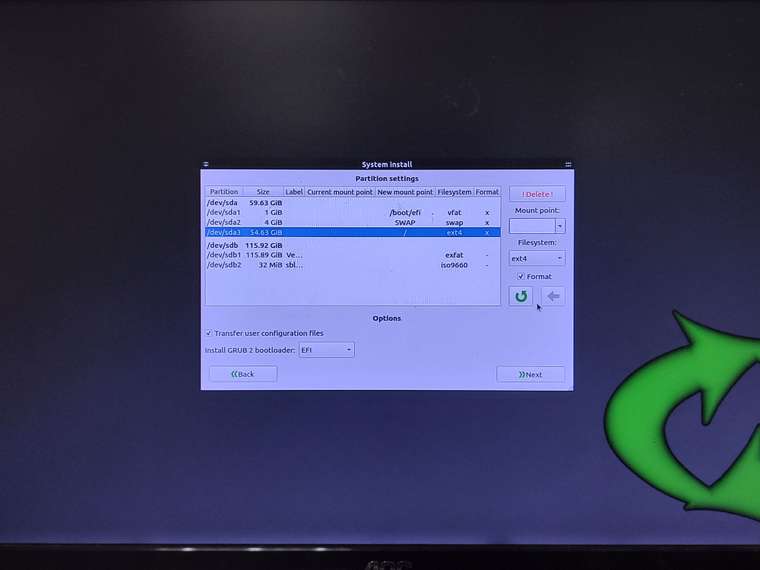
最后点击左下方的的对勾,使之变为如图所示的选项
点击Next,进入下一步; -
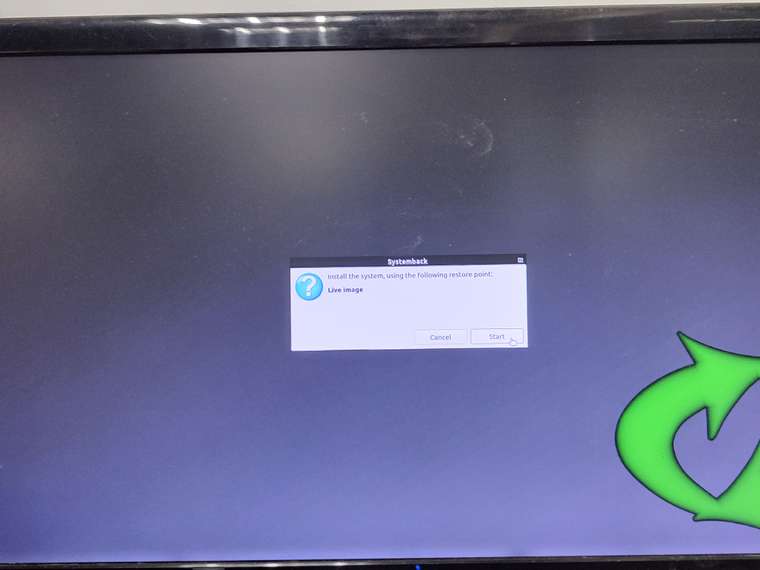
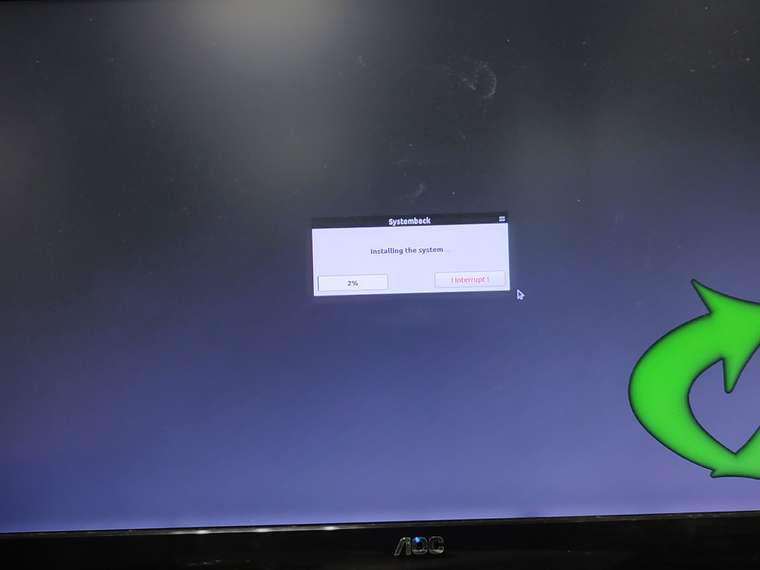
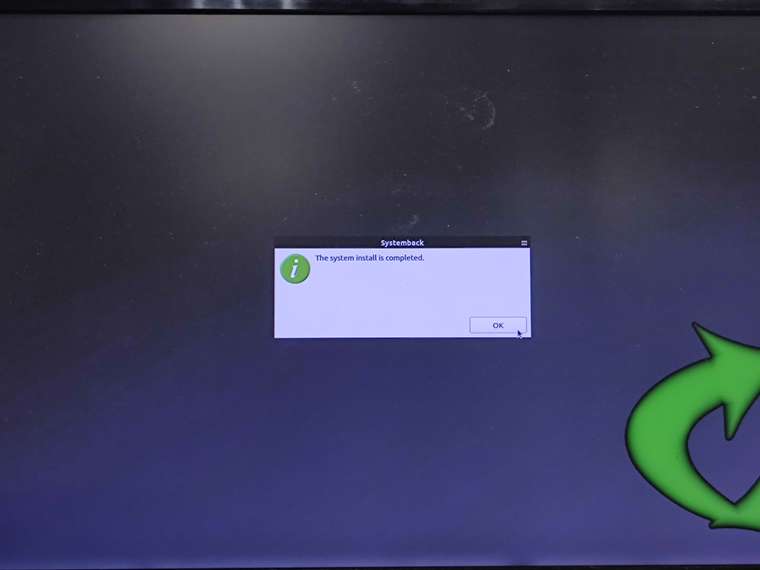
按照如图所示点击鼠标,进行安装以及完成安装的最后步骤。

-
重启后再拔掉U盘。
-