ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
谷歌cartographer使用速腾聚创3d激光雷达转二维数据进行2d建图
-
谷歌cartographer_ros请参考这篇安装教程:http://community.bwbot.org/topic/136/google激光雷达slam算法cartographer的安装及bag包demo测试
1. 数据包准备
本文建图将采用普通的2d 雷达数据,结合IMU和里程计数据进行2d建图。2d 雷达数据由速腾聚创3d激光雷达转换得到,其他数据由小强机器人底盘得到。
rosbag数据包的详细制作过程,请参考这篇教程: https://community.bwbot.org/topic/522/使用rosbag录制和回放3d激光雷达数据和小强ros开发平台的里程计imu数据
下文教程将以蓝鲸机器人录制的bag包为例,演示如何建立2d地图。bag包百度云下载地址2. 配置cartographer_ros
蓝鲸机器人github上的cartographer_ros已经配置好了所有文件,对于加装速腾聚创小强xq5开发平台采集的数据包,cartographer_ros需要使用的是下列文件,简略的说明在下文。cartographer_ros的详细文档可以参考官方wiki
cartographer_ros/launch/demo_xiaoqiang_rslidar_scan.launch #建图时启动的launch文件,负责启动rviz,加载cartographer_ros主要的启动节点和参数文件,话题数据名字的remap也在这个文件设定。 cartographer_ros/urdf/rslidar_2d.urd #模型文件,用来发布3d激光雷达、小车里程计、IMU、小车本体之间的tf关系 cartographer_ros/configuration_files/xiaoqiang_rslidar_scan.lua #cartographer_ros算法参数配置文件,优化建图效果需要调整的参数就是这个文件。ros中坐标系的设置,请参考这篇教程,小强xq5平台的base_link原点设置在两个主动轮轴中间位置。
# cartographer_ros/configuration_files/xiaoqiang_rslidar_scan.lua文件里面设置是否使用imu、odom数据的参数是这两个: use_odometry = true #true使能里程计,false禁用里程计 TRAJECTORY_BUILDER_2D.use_imu_data = false #true使能IMU,false禁用IMU# cartographer_ros)/urdf/rslidar_2d.urd文件需要调整的参数是3d雷达相对base_link的安装位置,laserbase_link等价于base_link <joint name="horizontal_laser_link_joint" type="fixed"> <parent link="laserbase_link" /> <child link="rslidar" /> <origin xyz="0 0 0.4" rpy="0 0 0" /> </joint>3. 启动cartographer_ros,播放rosbag数据包,开始建图
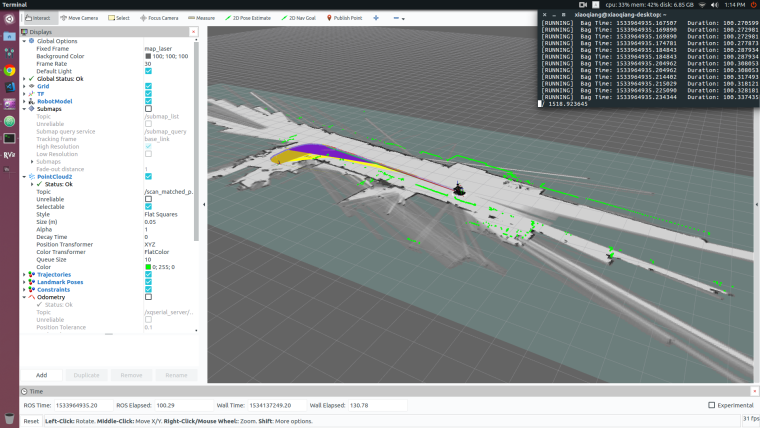
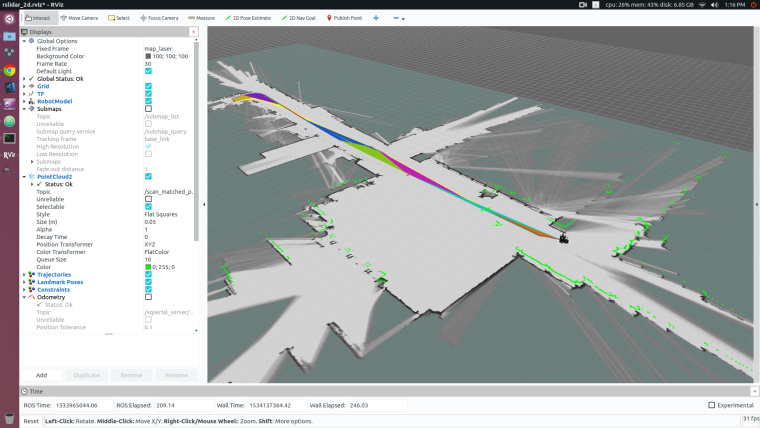
#先关闭小车的ros启动节点 #在小车主机上新开一个命令终端 sudo service startup stop roscore#启动cartographer #在小车主机上新开一个命令终端 roslaunch cartographer_ros demo_xiaoqiang_rslidar_scan.launch#播放bag数据 #在小车主机上新开一个命令终端 rosbag play --clock 2018-08-11-13-20-34.bag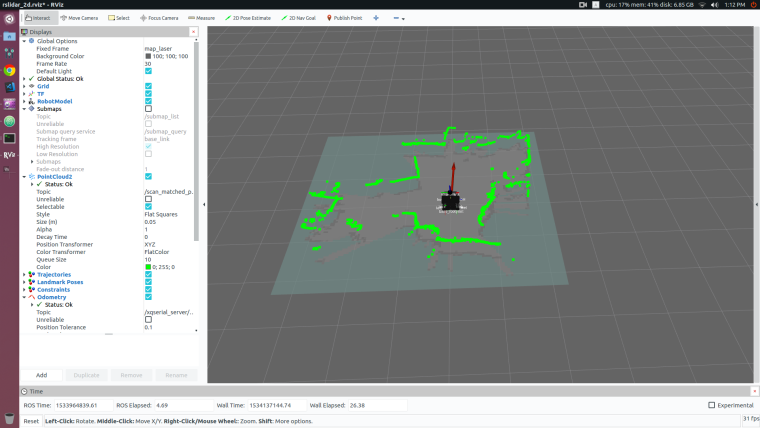
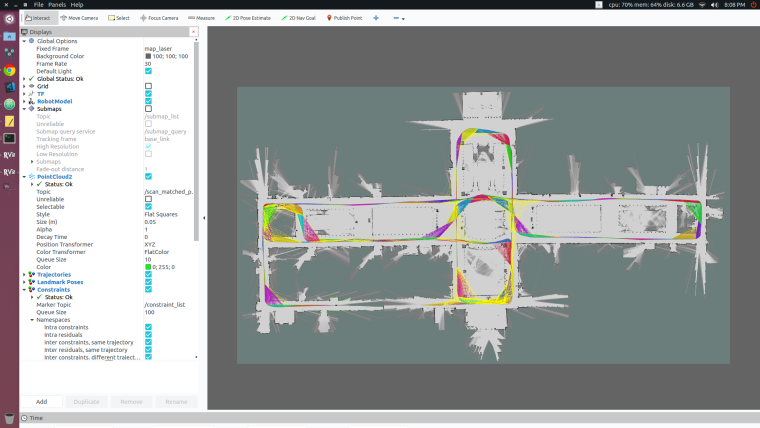
4. bag播放完成后,用map_server保存地图
rosrun map_server map_saver --occ 51 --free 49 -f work0保存成功后,会在home目录里面生成work0.yaml work0.pgm两个地图文件,这两个文件可以用来amcl导航。
-
@xiaoqiang您好,请问如果只用雷达数据来进行2D建图的话,cartographer_ros应该怎么配置呢?
-
# cartographer_ros/configuration_files/xiaoqiang_rslidar_scan.lua文件里面设置是否使用imu、odom数据的参数是这两个: use_odometry = true #true使能里程计,false禁用里程计 TRAJECTORY_BUILDER_2D.use_imu_data = false #true使能IMU,false禁用IMU -
@xiaoqiang 只使用雷达数据的话,tf的关系还需要修改吗?
-
@zhaoyu24 雷达数据所在frame到tracking frame之间的tf必须提供