@爱学习的小吴
这份pdf文件里面有基本的原理介绍,
伽利略系统产品手册.pdf
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
frank 发布的帖子
-
强调送餐机器人的实用性,「普渡科技」已实现产品量化并出货数百台发布在 行业动态
现在普渡科技的送餐机器人根据软硬件配置不同,分为低配、中配、高配三款,售价分别为2万元、3万元和6万元,4小时满充后可使用24小时。张涛表示,餐厅基本都可在一年甚至半年内回本。
虽然“机器人换人”的呼声喊了很久,但以现在人工智能的发展程度,还远不能取代大多数服务工作,尤其是教育、医疗、旅游和其他高端服务。但是人工智能的确可以将很多人从高频而重复的“复印机”工作状态中解放出来,同时还可以提升工作效率。成立于2016年的深圳市普渡科技有限公司是一家室内、楼内、室外配送机器人研发和生产公司。普渡科技CEO张涛告诉36氪,他们选择从餐饮行业切入市场,看好送餐服务“以机替人”的前景,并推出了几款送餐机器人。
餐饮行业中,菜品从后厨传到客人的餐桌,一般会经过送餐员和服务员两手服务。其中服务员需要帮忙上菜、介绍菜品、回答客人问题等,而送餐员的工作内容相对就简单很多,即单线或多线将菜品从后厨传递至服务员手中。这种简单、枯燥、重复的工作内容造成了送餐员工资低、流动率大的行业事实,餐厅对送餐机器人的需求也在逐年增长,以减少运营成本。
此前也有很多餐厅引进了送餐机器人,但大多都是作为营销噱头来吸引顾客,并无法真正解决餐厅的痛点和需求。缺陷也主要体现在以下三方面,首先,外形多是机器人形,菜品运载量小。二是由于当时定位导航技术的局限性,需要在餐厅地面上铺设磁条或是轨道,控制机器人的行进路线,对餐厅改造较大。三是机器人运行的稳定性差。
张涛告诉36氪,普渡科技的送餐机器人可以有效的解决以上问题。在运载量方面,单台机器人最多可设置5层托盘,一次出发最多可以设置5个目的地(即餐桌),同时普渡科技支持100个机器人之间的协作。在定位和导航方面,普渡科技使用了光雷达、视觉、UWB、编码器、IMU的多传感器融合方案,整体的定位、导航、避障精度可达厘米级,基本满足机器人在餐厅内的行进需求。而使用和机器人配套的软件产品,餐厅可以设定送餐模式(直达模式/巡航模式)、设定送餐点、云端监测运行状态、定制机器人屏幕广告等。
至于稳定性方面,张涛表示多家餐厅自去年9月开始试用,现在已出货和正在出货中的产品有数百台。根据面积不同,每家餐厅会采购1-10台送餐机器人等,一台机器正常可替代一名送餐员。现在普渡科技的送餐机器人根据软硬件配置不同,分为低配、中配、高配三款,售价分别为2万元、3万元和6万元,4小时满充后可使用24小时。张涛表示,餐厅基本都可在一年甚至半年内回本。

普渡科技现在的产品技术基本成熟,之后会不断迭代。张涛表示,他们现在注意力更多放在开拓市场方面。此前出货主要依靠10多家合作的代理商,未来还会通过参加展会等方式发展更多的代理商,普渡科技的精力则主要放在标杆性大客户项目上。
张涛同时提及,送餐行业“以机替人”情形尚未大规模普及,需要更多同类企业共同去培养和教育市场。现在市面上可见的送餐机器人公司还有YOGO、穿山甲机器人和擎朗智能等。YOGO获得IDG数千万元融资,产品具备在场景变化时,可以重新学习场景的特性,不过YOGO的送餐机器人尚未推向市场。新三板公司穿山甲机器人推出的艾米送餐机器人售价在两万元附近,目前销售量已达到了数千台。获得云启资本和松禾资本数千万元A轮投资的擎朗智能目前基本实现了收支平衡,除了送餐机器人,擎朗智能还推出了引导广告机器人。
普渡科技现有约20人,其中70%以上都是研发人员。始团队来自于香港科技大学、香港中文大学、香港大学、清华大学、中科院、中科大、西门子、腾讯、阿里巴巴、新美大、华为、大疆等著名高校和公司。
公司此前获得属于上市公司长盈精密的产业资本的天使轮投资,以及未披露细节的Pre-A轮投资。现在普渡科技正在寻求A轮融资,主要用于市场拓展和新产品的研发。
本文来源:http://36kr.com/p/5092216.html

-
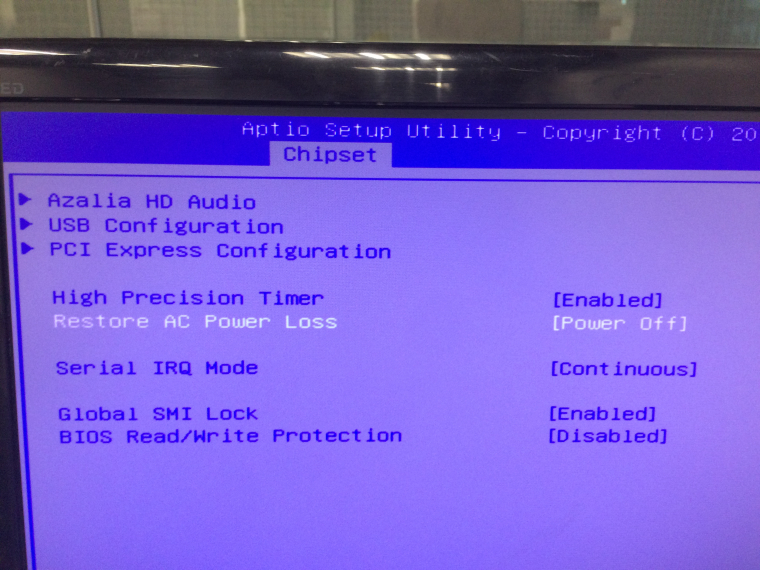
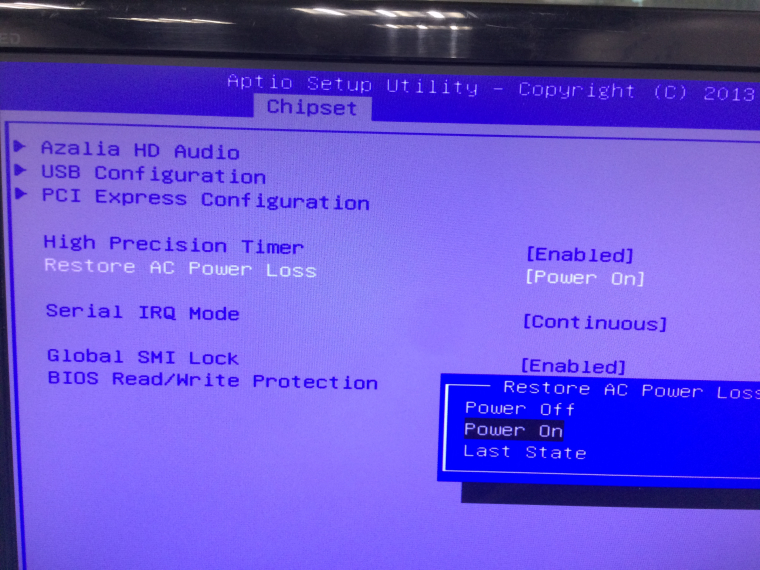
小强主机bios设置成通电自动开机发布在 产品服务
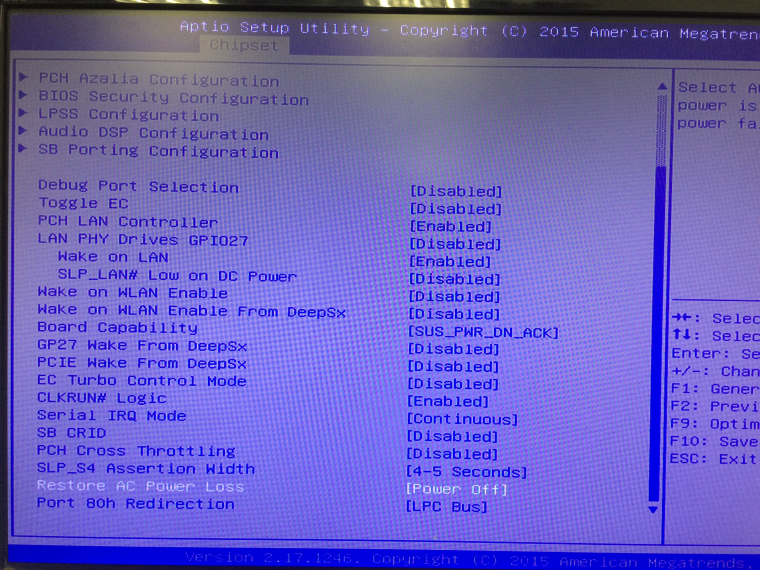
通过设置bios里面的Restore AC P ower Loss选项,power off改成power on即可将主机设置成通电后自动开机。
1.小强pro主机
开机按Delete键进入bios,选择第三个Chipset选项
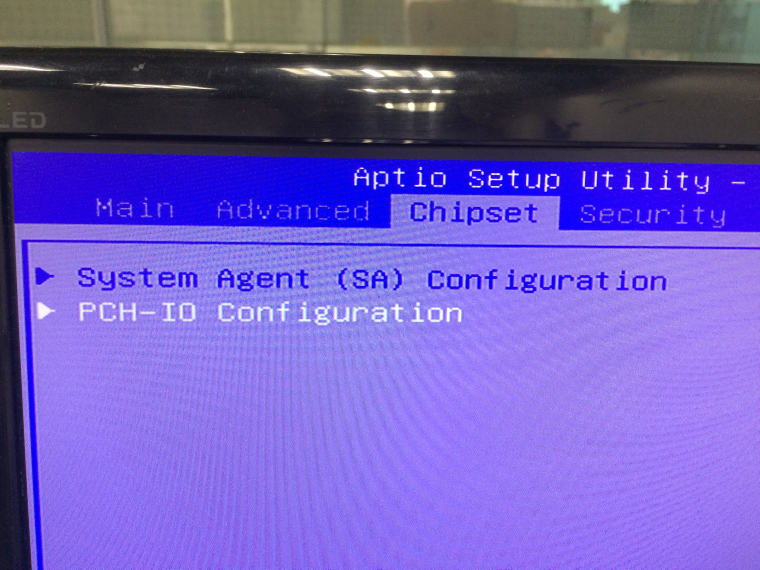
选择第二个选项PCH-IO Configuration,进入后修改Restore AC P ower Loss选项

F10保存退出,完成操作2.小强mini主机
开机按Delete键进入bios,选择第三个Chipset选项
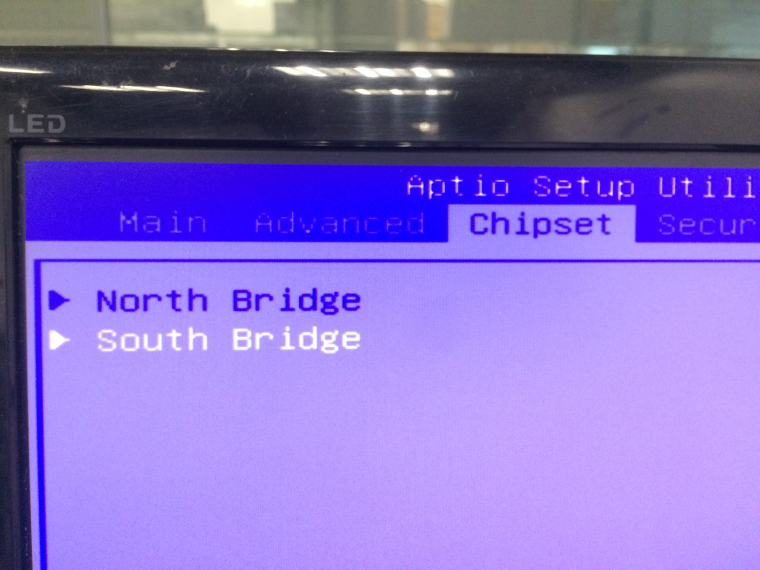
选择第二个选项South Bridge,进入后修改Restore AC P ower Loss选项
F10保存退出,完成操作
-
饮冰科技,6000元价位的单线200m激光雷达发布在 行业动态


饮冰科技的CEO金元浩原本是清华物理系的博士,曾在清华与富士康合作的清华—富士康纳米中心实验室和鸿海集团从事激光电子方面的相关研究。饮冰科技是他与两位哈工大的本科校友在去年 4 月共同创办的。创业之前,一次偶然的机会,金元浩去参加启迪之星的汽车论坛,并由此参观了长安汽车的主机厂。看到自己相熟的领域自然就会多留意一些,而他当时比较惊奇的是,激光雷达正在逐渐成为很多出厂汽车的标配。
“这个东西我们自己也可以做”。
回去后,金元浩就邀来两位同学一起组建了团队,并在一年后有了眼前这两款产品:一款单点的激光雷达和一款单线激光雷达。
LiDAR创业还有机会吗?这家公司想凭单线激光雷达杀出重围
负责硬件和技术方案设计的姜波是清华硕士,曾参与主持星载激光雷达(主要用于航空探测)、神州八号交会对接激光雷达、月兔月球车导航与避障激光传感器等国家级项目;赵忠尧则负责产品数据处理及软件设计,曾获飞思卡尔全球智能汽车竞赛国家级奖项,并担任全国智能汽车竞赛实验室负责人。
饮冰的单点激光雷达体积为 205030mm,单线激光雷达为 80*90mm,两者测试距离都可达到 200m(可根据要求调为 200m 以下),精度为厘米级。
-
小强ROS机器人教程(24)___使用ROS topic控制蓝鲸电机套件发布在 产品服务
蓝鲸电机套件和小强底盘的控制方式是一样的,即通过串口控制,通信协议也是一样的。下文将演示借助bw_motors包在ros中同时控制两个电机的速度的详细步骤。
基础概念:
1.两个电机mA、mB分别对应驱动板中的MA、MB接口所接入的电机,mA电机又称为左电机,mB又称为右电机
2.电机套件usb转串口模块接入小车主机后,在dev目录下一般会自动添加ttyUSB1设备。如果主机还插有其它usb转串口模块,可能不会是ttyUSB1
这个名字,蓝鲸电机套件接入主机指定的usb口“电机串口”,这个名字可以自动固定为stm32Motor,这是由udev规则实现的,小车出厂时已经配置好。
3.电机的速度是通过bw_motors包中的Motors这个topic类型来指定,里面有两个8位整数变量,分别对应左右电机的速度。这里的速度是百分比,取值范围-100到100,对应最大反转速度到最大正转速度。例如:-50 表示以最大反转速度的百分之五十运动,50表示以最大正转速度的百分之五十运动。bwbot_motors包的安装与启动:
1.下载与安装
#以小强平台为例,其它平台请修改对应ros工作空间目录 cd ~/Documents/ros/src git clone https://github.com/BlueWhaleRobot/bw_motors.git cd .. catkin_make2.启动驱动
rosrun bw_motors motors_control.py _port:=/dev/stm32Motor3.驱动启动后,motors_control.py会持续监听/bw_motors/cmd这个topic,将这个topic内容转换成电机控制命令,最后通过串口下发给电机套件进行控制。
在ros中发布两电机速度控制量:
1.首次测试,为了防止电机飞转造成安全事故,请把电机负载悬空使电机可以自由空转。紧急情况下,关闭motors_control.py的运行即可制动电机。
2.发布话题/bw_motors/cmd#mA_speed后面值-10可以修改成为-100到100内的任意整数,对应左轮电机速度控制量 #mB_speed后面值10可以修改成为-100到100内的任意整数,对应右轮电机速度控制量 rostopic pub bw_motors/cmd bw_motors/Motors '{mA_speed: -10, mB_speed: 10}' -l3.现在电机开始运动,修改mA_speed、mB_speed值即可改变电机速度,切断motors_control.py的运行可以制动电机。
-
win10 Run-time error '8020' Error reading comm device发布在 技术交流
在win10中使用vb的串口控件操作串口外设时,可能会出现下列问题
Run-time error '8020' Error reading comm device此时用其它非vb程序却可以正常操作串口,在google搜索的话只能找到一堆说MSCOMM32.OCX控件与win10系统不兼容的答案。最后通过安装PL2303_Prolific_DriverInstaller_v1_12_0 这个版本的usb转串口驱动后,问题成功解决。
总结: 在非vb程序可以正常操作串口情况下,驱动应该说已经安装成功了,但是vb程序此时仍然可能无法使用串口,。
-
RE: amcl定位导航,为什么rplidar有数据,但是没有被认定为是障碍,前面有障碍还是会装上去发布在 技术交流
@Ubuntu+turtlebot
costmap_common_params.yaml 配置文件,scan参数里面的marking和clearing项设为ture才会开启动态障碍物的处理
-
None of the XX first of XX (0) points of the global plan were in the local costmap and free发布在 技术交流
ROS运行move_base导航包时,如果使用的是DWA局部路径运动规划器,在参数forward_point_distance_取值不合适时(值过大)会出现这个错误
[ INFO] [1499261355.590026703]: Got new plan [ERROR] [1499261355.591269319]: None of the 0 first of 0 (0) points of the global plan were in the local costmap and free [ WARN] [1499261355.592835348]: Off Map -9.558478, 0.298699解决办法是将forward_point_distance_设置成合适的大小,比如0.5
-
丰田伙伴机器人HRS完成第一次家庭实验,实现护理援助发布在 行业动态

7月1日丰田宣布该公司的HSR(Human Support Robot人类援助机器人)在北美已经完成了第一次家庭实验。实验是与在阿富汗战争中受重伤而导致腰部以下全部瘫痪的退伍军人合作进行的。HSR重量轻,配有视觉装置,柔软灵活的机械手。人们通过智能手机或平板电脑上的图形界面跟它交互,也可以使用语音。它有三个基本模式:抓、取、手控;抓:对使用较大物体它会用夹子夹,小的则用内置的真空装置吸起;取:这个模式利用了其物体识别功能;受控:这个模式允许用户控制机器人。护理人员也可以在同一网络上使用HSR进行监护。
丰田在2005年成立伙伴机器人事业部,并在2012提出HSR计划。丰田的HSR原型是与日本介助犬协会合作开发的,旨在找出目标用户的真正需求。HSR侧重于拾起落物,拿东西,以及与用户家人和护理人员沟通。
HRS无疑会给行动不便人士带来希望和福音,不管是老年人,还是残疾或受伤人士。毕竟,我们都不大想麻烦别人。
本文来源:https://www.leiphone.com/news/201707/kQJqod9ZtxaFeuvE.html
-
手掌大小、20W功耗,百度将量产国内第一款车载自动驾驶计算平台 | CES Asia 2017发布在 行业动态
上海 CES Asia 第一天,百度与德赛西威、联合汽车电子两家汽车一级零部件供应商(Tier 1)达成基于百度自动驾驶专用平台 BCU (Baidu Computing Unit)的合作。
百度方面称,BCU 是为了解决自动驾驶技术落地应用难的行业问题应运而生的产品,是国内第一个可量产的车载自动驾驶计算平台。
据雷锋网了解,BCU 是基于高精度地图,结合 GPS、摄像头与 IMU 等传感器信息,提供自动驾驶所需要的高精度定位的专用计算平台。这一计算平台具备信息安全和云端更新两大基础能力和三大 AI 核心模块:高精定位、环境感知、决策规划。


*百度与联合汽车电子共同开发的 BCU-MLOP 参考硬件
在现场展出的两款 BCU,是百度分别与德赛西威、联合汽车电子开发的产品。两款 BCU 采用的硬件平台并不相同,前者基于德州仪器(TI)芯片,后者则是英伟达 Parker 芯片。
现阶段, BCU 已开发出三个系列产品:BCU-MLOC(高精定位)、BCU-MLOP(高精定位+环境感知)、BCU-MLOP2(高精定位+环境感知+决策规划)。不过,MLOP2 并没有在现场展出。
MLOC 的功能包括:储存中国境内高精度地图;云端更新数据和算法;结合视觉感知结果和高精度地图,输出厘米级车道定位和车道级导航信息。
定位指标包括横向定位精度 0.2 米;纵向定位精度 2 米;定位频率 20Hz。


*BCU 最多可储存 128GB 的高精度地图数据,基本上储存了全国高速公路的高精度地图。如果要调取相应地区的高精度地图,只需提供大致的 GPS 位置,系统就能将周边已定位的高精度地图进行调取。目前德赛西威与百度已联合开发出两个系列产品:MLOC(高精定位)、MLOP(高精定位+环境感知)。双方在自动驾驶涉及的高精地图与自定位、汽车环境感知、决策等领域进行联合开发,共同打造支撑汽车实现自动驾驶的专用计算平台量产产品。
据了解,在与供应商的合作中,百度提供软件层面的技术,供应商则负责系统硬件设计、软件框架、底层设计,以及产品的安全性、稳定性。
百度一位工程师向雷锋网介绍,BCU 解决的是车辆自定位的问题。汽车实现自动驾驶,首先要知道车的实时位置、周围有什么物体。以此为基础,汽车再进行决策:是否减速、并线超车或者进行其他的决策行为。
本文来源: http://www.leiphone.com/news/201706/MYb5efSJebTbNkY1.html
-
软银截胡丰田,接盘机器人公司波士顿动力发布在 行业动态

软银刚刚宣布,为促进企业进一步发展,将从Google母公司Alphabet手中收购两家机器人公司。其中一家正是凭借大狗机器人一炮而红的波士顿动力,另一家则是双足机器人公司Schaft。关于收购案的具体条款,软银目前尚未对外公布。2013年Alphabet(当时还叫Google)正式收购了Schaft和波士顿动力两家公司,当时也没有公布具体的交易条款。
被Alphabet收购后,波士顿动力一直活跃在人们的视线当中。时不时会通过视频向公众展示他们的最新机器人作品,谈论他们在制造仿生机器人方面取得的进步。这些机器人不仅可以在不同地形中长途跋涉,还能被随时唤醒。
相比之下,收购案中的另一家公司Schaft则有些默默无闻。Schaft于2012前后在东京大学的JSK机器人实验室,由联合创始人Yuto Nakanish、Junichi Urata、Narito Suzuki和Koichi Nishiwaki共同孵化。之后被Alphabet收购。Schaft被收购大约两年后才公布其第一个大型机器人原型,目前仍是一家神秘的公司。
早在一年多以前,外界就有传闻称,Google准备对外兜售波士顿动力。不久前,汽车制造商丰田对这两家机器人公司表示出了浓厚的兴趣,没想到却被软银截了胡。
软银集团董事长兼首席执行官孙正义发表声明称:“现在仍然有许多问题是人力所无法解决的。智能机器人将成为开启下一阶段信息革命的关键驱动力。而Marc和他在波士顿动力的团队无疑是先进动态机器人领域的领导者。”他说道:“我很欢迎他们加入软银这个大家庭,并期待能支持他们继续推动机器人技术发展,寻找让生活更加轻松、安全和高效的应用。”
波士顿动力团队对于这笔交易也十分欢迎。波士顿动力首席执行官兼创始人Marc Raibert发表声明称:“波士顿动力的所有成员很高兴能成为软银的一部分,推动下一次技术革命。我们也很认同软银‘技术是为了推动人类进步’的理念。我们期待与软银合作,共同推动机器人技术发展,在更加智能、互联的世界中创造更具价值的应用。”
本文来源: http://www.leiphone.com/news/201706/jjdMi7hDN8nsanhP.html
-
WWDC 2017:苹果涉足AR 上线ARkit平台发布在 行业动态
6月6日,国外媒体报道,周一在加利福尼亚州圣荷西的全球开发者大会(WWDC)上,苹果公司公布了名为ARKit的增强现实(AR)平台。
 12
12
苹果软件工程高级副总裁Craig Federighi表示,一夜之间,它将是世界上最大的AR平台。
Federighi通过咖啡、灯泡和花瓶,在舞台上演示效果。苹果公司展示了最近流行的AR游戏《精灵宝可梦Go》,还提到了来自宜家和乐高的AR应用程序。
苹果正好处于已经激增的竞争中。大多数大型科技公司,包括谷歌、Facebook、微软和Snapchat,都在AR上做出成绩。谷歌推出针对手机和平板电脑AR平台tango,以及新推出的人工智能应用Google Lens。Snapchat和Facebook已经有VR眼镜。4月份,Facebook宣布了自己的AR平台。微软公司则推出混合现实头戴式显示器Hololens。
苹果首席执行官蒂姆•库克(Tim Cook)曾经暗示要进入AR领域。库克在二月份向英国《独立报》表示:“我们不认为iPhone是针对某些人群、国家或垂直市场的。它是属于每个人的。AR也是这样。”
发布会demo演示视频
-
谷歌新Tango和一体机引入“视觉定位服务”,实现厘米级定位 | Google I/O 2017发布在 行业动态
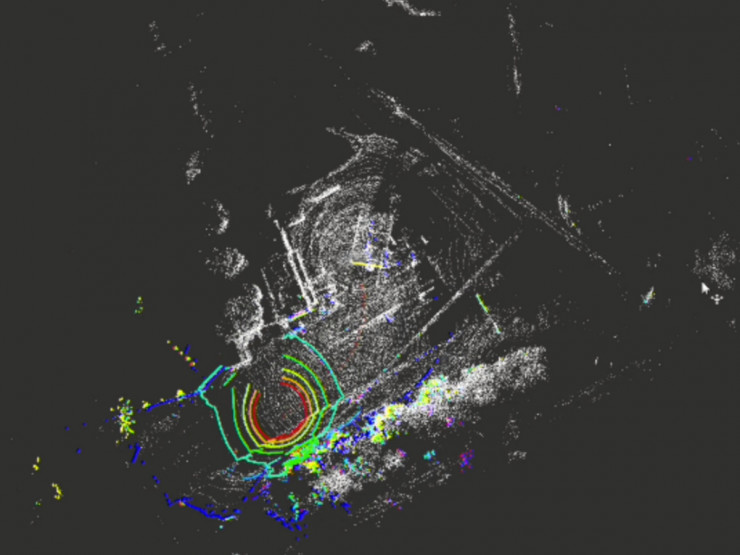
Google Tango 是一款基于智能手机的 AR 平台,可联合多个机载传感器和手机相机实时映射周围世界。目前,Google 公布了他们在基于 Tango 3D 感应计算机视觉技术提供室内定位细节信息方面的最新研究情况。
据雷锋网了解,Google 虚拟现实副总裁 Clay Bavor 在今天的 Google I / O 会议上提到:与现实世界紧密耦合的时候,AR 最为强大。 正因如此,他们才会一直与谷歌地图团队合作开展服务,以实现设备在室内对于位置信息的精确访问。
Bavor 将该功能描述为类 GPS,而非类卫星通话,Tango 搭载的摄像头呈三角形分布,基于“环境中不同的视觉特征”进行定位。
 谷歌新Tango和一体机引入“视觉定位服务”,实现厘米级定位 | Google I/O 2017
谷歌新Tango和一体机引入“视觉定位服务”,实现厘米级定位 | Google I/O 2017Google 赋予这项技术的学名是“视觉定位服务”(VPS),新版 Tango 将引入VPS,以帮助移动设备快速、准确地了解室内的位置信息。Bavor 对这项技术的应用范围和前景表示很有信心。另外,雷锋网(公众号:雷锋网)也在另外文章中提到,VPS 技术也将放入 Google 宣布的 Daydream 一体机中。
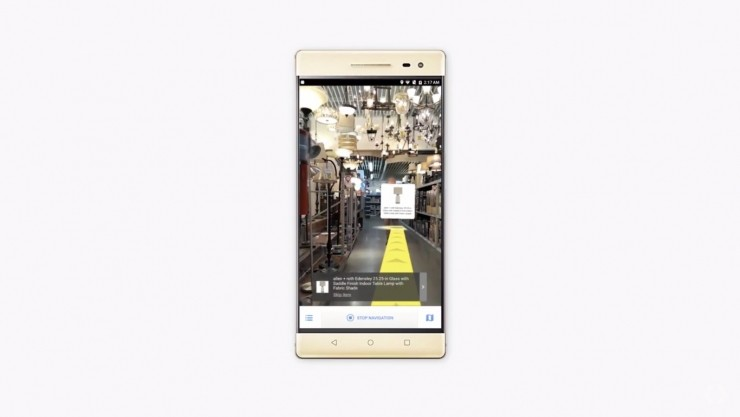
以顾客在大型家居装修店寻找一个特定的螺丝刀为例,Bavor 了说明该项技术的应用方式。他还现场展示了一段视频对此进行深入解释。视频中,系统通过一系列视觉特征点在室内进行导航,并通过新旧观察点的比较来确定物体位置。如此一来,手机就也能实现空间位置中的厘米级精准定位。所以,如果说 GPS 可以指引我们进门,那么之后就得靠 VPS 来准确定位我们需要寻找的物品。

谷歌于 2015 年发布了 Tango 技术的开发套件,去年推出首款消费级设备,第二代 Tango 发布时间定则于今年夏天。
Bavor 提到,VPS 可以与音频接口相结合,未来就能够帮助视力障碍者改变在世界各地的行走方式,此外它也将成为谷歌镜头的核心组件。雷锋网希望 VPS 能带来好的定位效果。
本文来源: http://www.leiphone.com/news/201705/30j4truMqWvqcOys.html
-
获4000万A轮融资,钛米机器人将持续发布多款特种医疗服务机器人发布在 行业动态

随着人口老龄化的加剧及对生活品质要求的提高,人们对健康的关注越发明显。而据WHO的报告,到2035年全球将会有大约1290万的医护人员短缺。对医疗人员的需求无法得到满足,也在某种程度上促进了未来对医疗机器人使用的需求。近日,定位为特种医疗服务机器人的上海钛米机器人宣布获得4000万A轮投资,由IDG领投,国科嘉和、科沃斯和创徒基金跟投。据悉,此次融资将主要用于钛米机器人的产品研发及市场推广方面。事实上,早在去年9月份钛米机器人就曾获得国科嘉和及创徒基金的1000万天使轮投资。2015年1月成立的钛米机器人,前期基于原有的经验积累主要是以通用机器人底盘为切入点,为了近一步接近市场又陆续开发了应用于餐厅、博物馆等导引服务机器人产品。而在这不断摸索的过程中,钛米机器人也逐渐寻找到了一条适合自己的道路。现阶段,钛米机器人将着重研发相关的特种医疗机器人以实现在医疗领域的行业布局。
而关于此次投资,科沃斯董事长钱东奇也曾表示,在应用场景中寻找真正需求点,解决实际问题是服务机器人企业思考和探索的方向。钛米机器人在医疗服务领域的尝试让机器人在医院服务体系中发挥一定的作用,逐渐达到节省人力以及替代人完成不适合人去做的特定工作的效果。
目前,钛米机器人在医疗领域已经研发推出了两款医疗机器人。其一,是医疗物资运输机器人,能提供手术被服、高值耗材、管控药品等医疗物资的配送、管理功能;其二,是核医学科病房服务机器人,提供送药、监护、陪伴等功能。创始人潘晶表示,产品的核心技术优势主要体现在机器人的移动、壁障、导航、人机交互、通用机器人底盘技术等方面,同时也综合运用了目前的人脸识别、语音识别、语义分析等技术以实现更好服务体验。

提及医疗机器人,目前普遍可以分为手术、康复、辅助、服务机器人四种。其中,手术机器人可以被用于手术影像导引和微创手术,典型有DaVinci手术机器人、机器人放射系统Cyberknife、Navio的机器人辅助手术系统;康复机器人可以用来辅助和治疗残疾、年老等行动不便的人群,常见的有Rewalk、Cyberdyne、EKSO;辅助机器人多是可以感觉并且可以在处理感官信息后给予用户反馈操作的设备,如个人护理机器人、高级治疗机器人PARO; 而服务机器人则有医用运输机器人以及消毒和杀菌机器人等。国内典型的有,天智航的骨科手术机器人,涉及医疗及辅助手术的妙手机器人,定位于专科定制式手术机器人的术康医疗,神经外科机器人Remebot,康复机器人傅里叶智能等等。
相比之下,潘晶表示国内很多机器人仅是实现医疗自动化,且多数公司通常会从别处购买底盘,而钛米机器人则是自主研发的并且是国内首款支持ROS系统的医疗服务机器人平台;同时,钛米机器人可选择性携带等多种传感器和其他附件,包括红外、超声、激光雷达、语音模块等以实现自主导航、避障、人机交互和无线视频图像传输等功能,从而帮助医生及时采集患者各项生理数据。此外,从风险性角度考虑,钛米也将逐渐扩展在其他多款机器人的研发。
此外,关于市场推广方面,钛米机器人前期主要依靠自有团队对重点医院跟进部署以开展临床应用合作,后续则将会以代理商渠道合作方式为主。据了解,目前钛米机器人已在武汉协和医院放射科、手术科等科室进行临床应用测试。此外,在郑州、北京等地也有多家医院在展开合作。从营收方式来看,钛米并非以单纯的出售硬件产品来盈利,而是为医院提供一整套的增值服务方案。
团队方面,创始人潘晶毕业于上海交大控制工程专业,曾任职于美国国家仪器公司,具有8年研发及3年市场经验,此外,他创立的上海指尖医疗为多家医院提供HIS解决方案。目前,公司整体规模超30人,团队成员在过去曾为全球的高校、研究所、机器人公司研发机器人设计工具和系统,先后经手了备受欢迎的乐高机器人EV3、全美国最大的高中生机器人比赛First Robot Competition的官方硬软件系统和MIT的猎豹机器人系统。
据悉,钛米机器人预计在今年年底实现10家落地合作医院,同时也会继续研发其他几款医疗机器人。
-
ubuntu ssh登入速度太慢的解决办法发布在 技术交流
打开/etc/ssh/sshd_config文件
sudo gedit /etc/ssh/sshd_config将GSSAPIAuthentication 设置未no,同时添加UsePAM no 、UseDNS no这两项
# GSSAPI options GSSAPIAuthentication no UsePAM no UseDNS no保存后重启ssh服务
sudo service ssh restart
-
ROS node的参数的默认值发布在 技术交流
ros的node支持传入缺省参数,这些参数可以在程序中设置默认值,通常c++用法
nh.param("参数名字",对应变量,默认值);注意点: 参数名字的命名空间是node的名字,node启动时如果配置了这个参数,这个参数值会一直保存到roscore结束,而不是随着node的结束而删除;当这个node再次启动时,如果此时没有传入参数值,它将
使用上次node启动设置的值,而不是默认值。
-
7月份,真机地虎将开启“大学园区快递机器人”测试计划发布在 行业动态
物流行业被“机器人”盯上由来已久。除亚马逊、京东等巨头企业热衷的无人机配送之外,还有一种方案也被国内外的创业者探索、实践着。
“7月份我们将启动无人配送校园计划,在第一所高校投放5-20台产品”,真机智能创始人刘智勇对雷锋网说道。创办真机智能前,刘智勇是阿里巴巴“瓦力超级大脑”的技术负责人。他口中的产品,正是无人机外的另一种方案——配送机器人(无人小车)。真机智能研发的配送机器人名为“递虎”,专注于解决大学校园里最后一公里的配送问题。

递虎是真机智能的第一代产品,即将完成组装。它高约0.8m,自重30kg,最高可载重为30kg,依靠直径为25.4cm的轮子“行走”,行进速度约10 km/h,相当于人骑自行车的普通速度。高大的身躯和较大的轮子,可以保证它在负重30kg时,安全跨越减速带,爬上最高35°角的斜坡,但“递虎”还不具备通过台阶的能力。
递虎在视觉上采用激光雷达的方案,早期测试版中,因为采用了Velodyne的激光雷达,仅此一项成本高达8000美元。而在即将组装完成的版本中,采用了其他厂商的激光雷达,成本降至3000元内。此外,在激光雷达基础上,还通过视觉算法作为辅助。
递虎接到指令后首先要以2D地图作为路径规划参考,然后根据GPS做初步定位。实际行走中,通过激光雷达、视觉和惯导,对环境建图、定位,来实时规划路径;而在避障方面,由于路面状况太繁杂,依靠端到端算法做决策的技术并不足够,因此真机智能选择了靠机器学习模型预测结果和规则相结合的方式,来实现控制决策。
另外,之所以盯准校园这个应用场景,刘智勇的考虑有两方面:一方面在于学校环境相对简单,利于配送机器人的初步尝试和迭代更新;另一方面是大部分学校规定快递员不准进入校区,学生收、寄快递必须要走一段路,校园的最后一公里配送基本处于空白地带。
不过,在这个细分领域,真机智能并非首创。据雷锋网了解,由Skype 的联合创始人 Ahti Heinla 和 Janus Friis创办的Starship在2017年初刚刚获得1720万美元种子轮融资,并在美、英、德等多个国家进行了商业化试验,为消费者提供食品、生鲜杂货及快递的配送服务;而由麻省理工学院计算机科学专家Sonia Jin和Stav Braun以及宾夕法尼亚大学机器人学家Uriah Baalke共同创建于2015年的Dispatch,也在去年4月份将200万美元种子轮融资收入囊中。
这两家国外公司,盯着的也是最后一公里的配送。

Starship送货机器人

Dispatch送货机器人
有两家国外公司在前,国内媒体报道真机智能时,也往往将其形容为“中国的Starship”,而刘智勇认为,“递虎”与国外公司至少有四方面的不同:- 应用场景
一方面,国外的路面、基建环境相对较好,机器人能够直接从商场、邮局配送到家。国内不具备这样的环境,这也是真机智能选择大学校园(环境相对简单)作为切入点的原因;另一方面,国内物流配送的频次要远远超过国外,市场容量和需求比国外大很多,机会与挑战并存。
- 技术方面
无论是Starship还是Dispatch,其产品均未使用激光雷达作为“眼睛”,主要以摄像头作为视觉解决方案,这是技术方面最大的不同。真机智能采取的方案为激光雷达+视觉算法辅助,这导致“递虎”只能采用“侧开门”的设计方案,将最上方留给旋转式激光雷达,这样做的好处是既保证了载货容量,也尽可能减少了盲区。
- 性能方面
在性能方面, “递虎”的载重、速度前文都有介绍,这两项指标都优于Starship,但在行驶总距离上便无法比较,而Dispatch的机器人Carry可载重45公斤。
- 防盗方面
递虎采取了三方面措施,保证自己和货物的安全:一是通过警报向行人求救;二是通过拍照,上传到互联网;三是通知中枢系统,实现远程接管。
此外,除了快递这项业务,刘智勇认为在“校园安防”方面,递虎更有其用武之地。当前大学意外事故频发,为学校和家长都造成了极大的困扰,而摄像头和学校保安部无论如何也无法保证万无一失。递虎能够在夜间自动进行巡逻,并配有气体、火焰检查,能够及时发现意外。
目前,真机智能的团队共有9人,分别来自苏黎世联邦理工学院、帝国理工学院、清华大学和阿里巴巴的人工智能团队。雷锋网问起是否有扩张的计划时,刘智勇认为,控制扩张的节奏对于创业公司而言非常重要,目前的团队人数、构成都能够满足现阶段的工作任务,未来是否扩容取决于业务需求。
2016年8月,真机智能获得清华大学创+种子基金和Plug and Play的融资,目前正在启动下一轮融资计划。
本文来源: www.leiphone.com/news/201703/flREWnDONwKSwHUk.html
-
小强ROS机器人教程(11)___kinect跟随包turtlebot_follower发布在 产品服务
注: 2017年3月15日之后购买的用户请跳过安装步骤,直接从步骤2开始测试turtlebot_follower利用深度摄像头反馈的点云图,计算一定区域内的点云中心坐标作为目标跟随点,根据这个坐标和设置的安全距离控制底盘移动实现跟随功能。
下图小强识别出人的双腿后,在人腿位置设置了一个红球作为目标点
1.安装软件包
VNC登入小强主机后,进入ros工作空间,下载安装测试软件包
cd Documents/ros/src/ git clone https://github.com/turtlebot/turtlebot_msgs.git git clone https://github.com/BlueWhaleRobot/turtlebot_apps.git cd .. catkin_make2.保证小强前方2米*2米范围空旷无杂物,先检查kinect角度是否水平,如果不处于水平状态请先关闭小车底盘电源,在小强主机上启动turtlebot_follower包
roslaunch turtlebot_follower xiaoqiangfollower.launch #kinect设备使用这个launch roslaunch turtlebot_follower xiaoqiangfollower_realsense.launch #realsense设备则使用这个launch正常启动后会出现下图
启动后,脚本会发布电机角度控制命令,保持kienct处于水平姿态,再打开小车底盘电源。
3.此时人进入小强前方视野,会激活小强的跟随功能,小强开始跟随人的移动而移动
修改小强主机上的/home/xiaoqiang/Documents/ros/src/turtlebot_apps/turtlebot_follower/launch/freenect.launch文件中如下图中的参数,可以控制跟随性能

常见问题:
1.开启kinect后没有响应,提示no points found之类,检查kinect型号是不是model 1473, 如果是1473需要先运行一遍freenect-micview程序激活一下固件。
小强主页
返回目录
-
除了那 153 亿美元,关于 Intel 收购 Mobileye,你还应该知道这些发布在 行业动态
本文来源: GeekCar,作者mark
在 Mobileye 的 CEO Ziv 以及 CTO Dr. Amnon Shashua 发给员工的声明信中提到了如下几个细节:-
在本周一之前, 出于法务上的原因,Mobileye 的管理高层以及董事会都将收购的事宜对员工进行了保密。所以大家也别去向在 Mobileye 工作的朋友打听了,他们也和我们一样被稳稳的老哥们搞了个大新闻。
-
虽然 Intel 全资收购了 Mobileye,但是与一般的收购不同:在交易完成后,Mobileye 将反过来整合 Intel 的自动驾驶部门(Automated Driving Group,简称 ADG)。 Intel 的 ADG 团队将成为 Mobileye 的一部分,并且还是会以以色列为研发总部。
-
目前在 ADG 所拥有的大部分技术及员工都将并入 Mobileye,这其中包括:系统工程师、车辆研发工程师、软件工程师、模拟器、地图采集设施、云计算及数据中心等。这些资源将大大提升 Mobileye 的研发实力。
-
Mobileye 将保持自己的品牌名称,但是 Logo 会做出相应的变化以体现与 Intel 的关系。
-
Ziv 和 Shashua 将和之前一样继续领导 Mobileye 的团队以及业务。Intel 并不会派人参与或干涉 Mobileye 的运作,但是 Mobileye 也会主动去学习 Intel 的企业文化及经验。
-
Mobileye 的业务也将维持不变,这其中包括之前已经发布过的和一系列主机厂以及 Tier 1 的合作、芯片业务、EyeQ Roadmap、后装业务等。Mobileye 会借助 Intel 的资源进一步扩充自己在上述领域内的优势。
-
整个收购的流程最早要到 2017 年底才会完成。在收购完成之前,Mobileye 现团队的业务及工作状态将保持不变。Ziv 和 Shashua 将在仔细分析 Intel 的资源之后,制定详细的整合计划。整合将进一步扩大 Mobileye 的公司规模,包括在以色列及美国境内设立多个新的研发据点。
在此之前,业内还没有公司能够在软件与硬件两个方面都处于绝对领先的地位,数据方面则是各家都在搜集。这也是大家都在抱团合作的原因——为了达到优势互补并在一定程度上共享数据。但在这次收购之后,一个「软硬兼施」的新型自动驾驶巨头诞生了。CES 2017 上,Intel 发布了自己的自动驾驶平台 Intel GO,他提供了处理芯片、5G 支持、FPGAS 等技术。现在,Intel 在自己原有的硬件实力基础之上又得到了 Mobileye 的视觉处理算法,这样的整合无疑能够更好的提供高级别的自动驾驶解决方案。
其实,早在年初的拉斯维加斯 CES 上,Dr. Amnon Shashua 就说过,Mobileye 已经完成了从 ADAS 公司到自动驾驶公司的转变。不过,与以往的工程师形象不同的是,Shashua 重点强调了商业运作(Logistic Problem)在自动驾驶领域的重要性。不管是出席哪个公开会议或活动,Shashua 都会去主动提倡行业内的合作、数据的共享以及自动驾驶解决方案的标准化。我之前对这样的倡议能否在群雄逐鹿的自动驾驶领域中快速推广是持怀疑态度的。事实证明,我还是太年轻了,Shashua 教授早就在背后默默的搞起商业运作了。收购完成后的 Intel 与 Mobileye 将更有能力去推动行业的整合,尤其是撬动更多的主机厂。
有意思的是,在 3 月 8 日,Intel 在北京举办的自动驾驶发布会上,我曾经向 Intel 的发言人请教过 Mobileye 在 CES 上提到的 Reinforcement Learning 在自动驾驶领域内的应用。 对方的回答是他对 Mobileye 的技术并不了解(这也是为什么我会自己跑去研究 Mobileye 的论文…)。如果真的如他所说,那么收购后双方的整合还确实需要有很长的路要走。
在本周四的德国柏林,Shashua 博士将在博世主办的 Bosch Connected World 大会上登台。届时他会不会进一步去谈谈这次收购? GeekCar 会赴德国现场做报道,请大家持续关注。
-