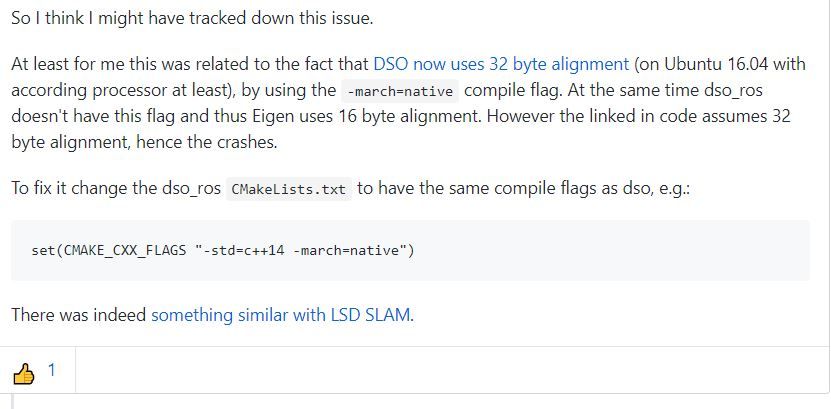
原因可能是有函数声明了返回值,但是实现代码却没有return返回值,修复代码后重新编译即可。
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
frank 发布的帖子
-
roscpp程序catkin_make编译,debug模式正常但是release模式异常的原因发布在 技术交流

-
RE: 怎么运用 global_planner发布在 技术交流
https://community.bwbot.org/topic/43/为ros-navigation功能包添加自定义的全局路径规划器-global-path-planner
-
RE: 高手们帮帮我,更新底盘xqserial_server报错发布在 技术交流
@mm galileo_serial_server包有没有编译成功,galileo_serial_server包是不是代码分支不对,或者你的xqserial_server代码分支不对
https://git.bwbot.org/publish/galileo_serial_server #先试master分支,不行再试noetic分支
-
RE: 自启动报错:ResourceNotFound: galileo_api发布在 技术交流
@mm 系统被破坏了,https://community.bwbot.org/topic/2939/如何在重装系统后恢复xiaoqiang设置
-
RE: rosdep init 或者rosdep update 连接错误的解决办法发布在 技术交流
#当前可用ip 2020-06-05 151.101.84.133 raw.githubusercontent.com 140.82.113.4 github.com 185.199.111.153 assets-cdn.github.com 199.232.69.194 github.global.ssl.fastly.net
-
videoc_streamon error 28, NO space left on device解决办法发布在 技术交流
解决办法:修改uvc默认带宽分配值
对于x86工控机 #新建配置文件 sudo gedit /etc/modprobe.d/uvcvideo.conf #添加内容后保存退出 options uvcvideo quirks=0x80 #重启生效 对于rk3588 sudo nano /boot/orangepiEnv.txt #修改extraargs参数 extraargs=cma=64M uvcvideo.quirks=128 #重启生效