@k1ngwr 重新安装noetic版本镜像
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
Posts made by weijiz
-
RE: 使用xiaoqiang_track进行人体跟随和追踪posted in 技术交流
@httttt 相关依赖没有安装吧
sudo pip install scipy scikit-image matplotlib pyyaml easydict cython munkres==1.0.12也可以使用https://git.bwbot.org/publish/body_pose 包。catkin_make时会自动安装依赖

-
Ubuntu 共享打印机posted in 技术交流
CUPS 简介
CUPS(Common UNIX Printing System,通用Unix打印系统)是Fedora Core3中支持的打印系统,它主要是使用IPP(Internet Printing Protocol)来管理打印工作及队列,但同时也支持"LPD"(Line Printer Daemon)和"SMB"(Server Message Block)以及AppSocket等通信协议。
简单来说它会给你的打印机添加网络控制协议,让它变成一个网络打印机。这样我们就可以在局域网内共享打印机了。
安装和配置
安装cups程序
sudo apt-get install cups sudo usermod -a -G lpadmin $USER sudo cupsctl --remote-any配置cups
在浏览器输入 http://127.0.0.1:631/admin,进入cups网页配置界面,第一次进入可能会要求输入用户密码。
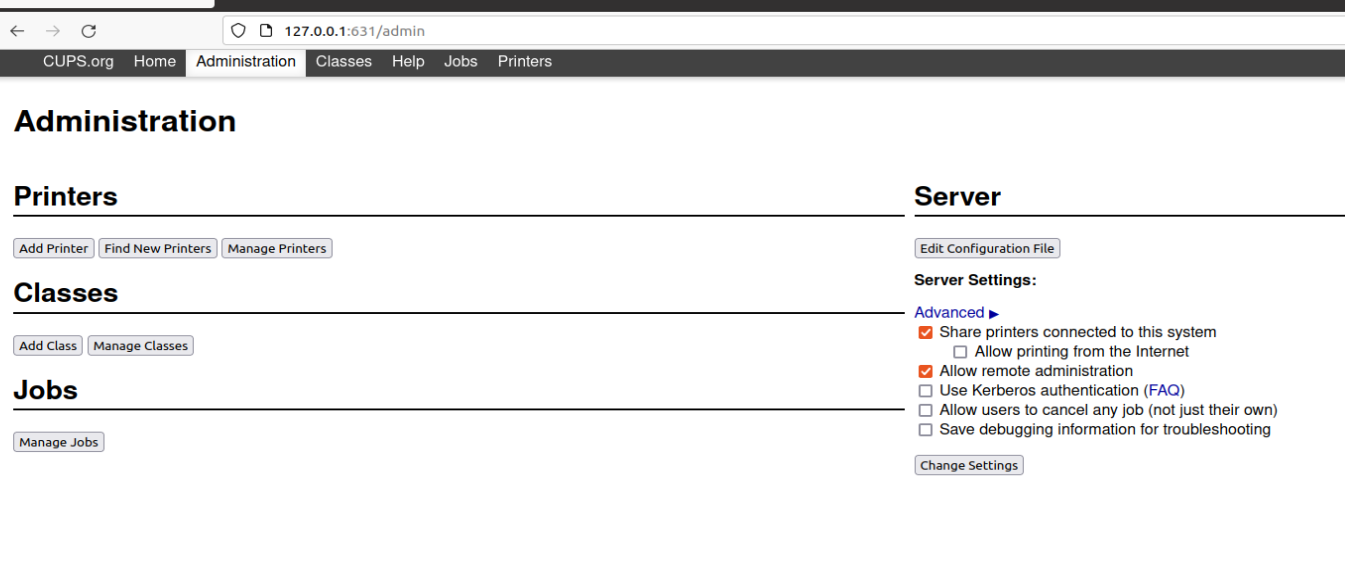
选择add printers添加打印机
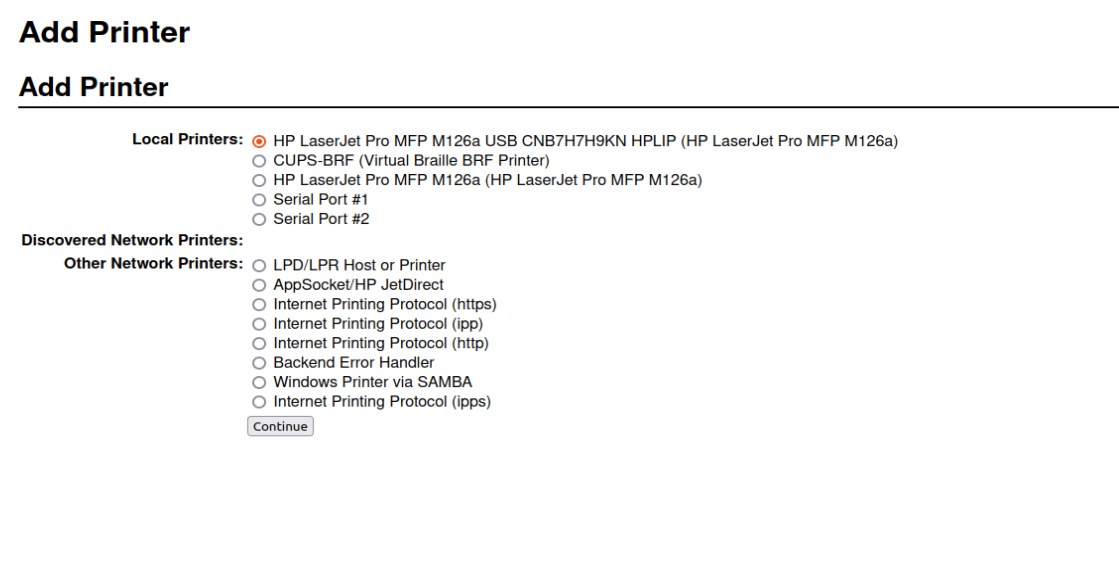
在打印机列表中添加自己的的打印机。选择完成后点击continue
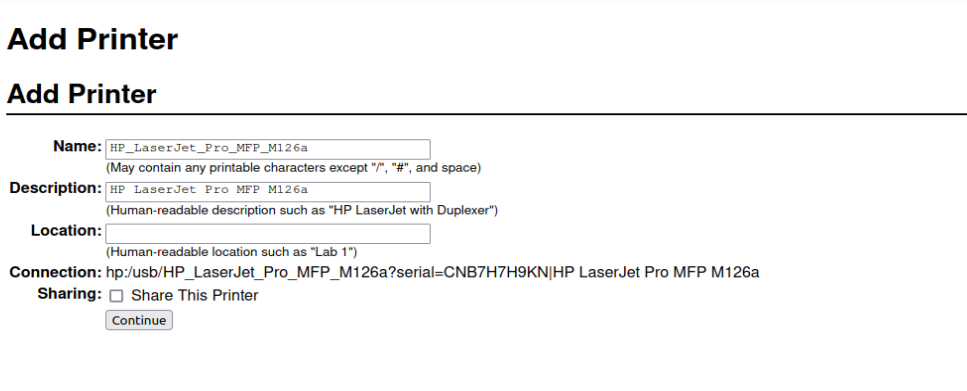
location里面可以随便写,注意选中share this printer。设置完成后继续点continue
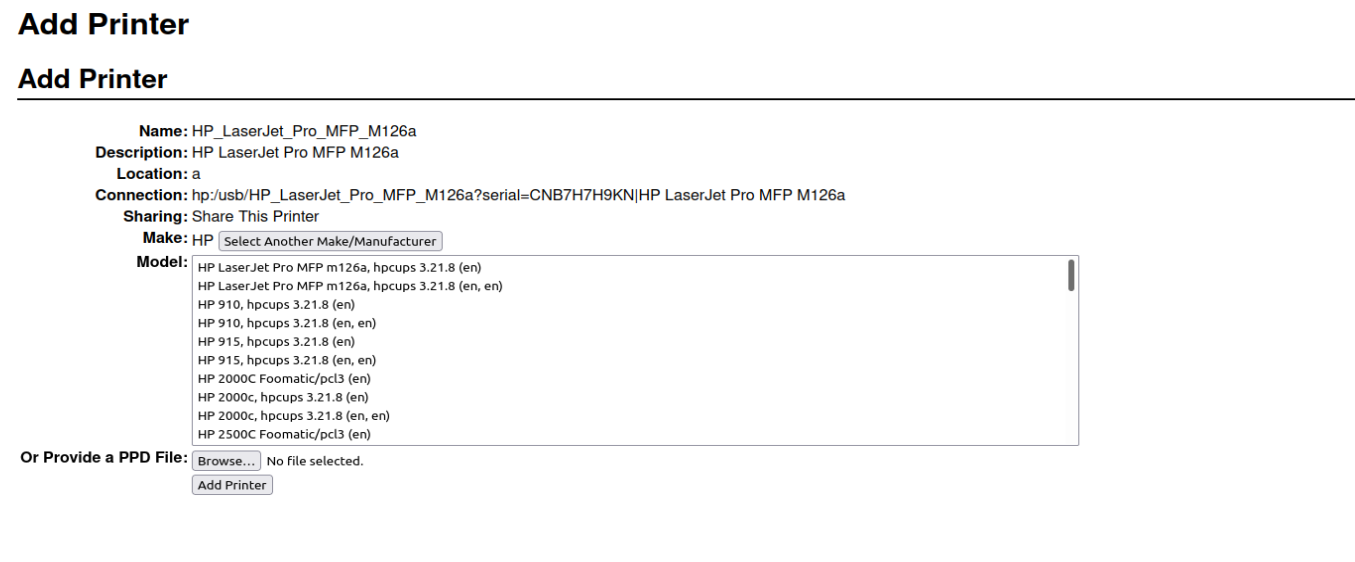
在上面的界面中选择自己的打印机型号和对应的驱动,pdd文件可以不选。选择完成后点击add printer。
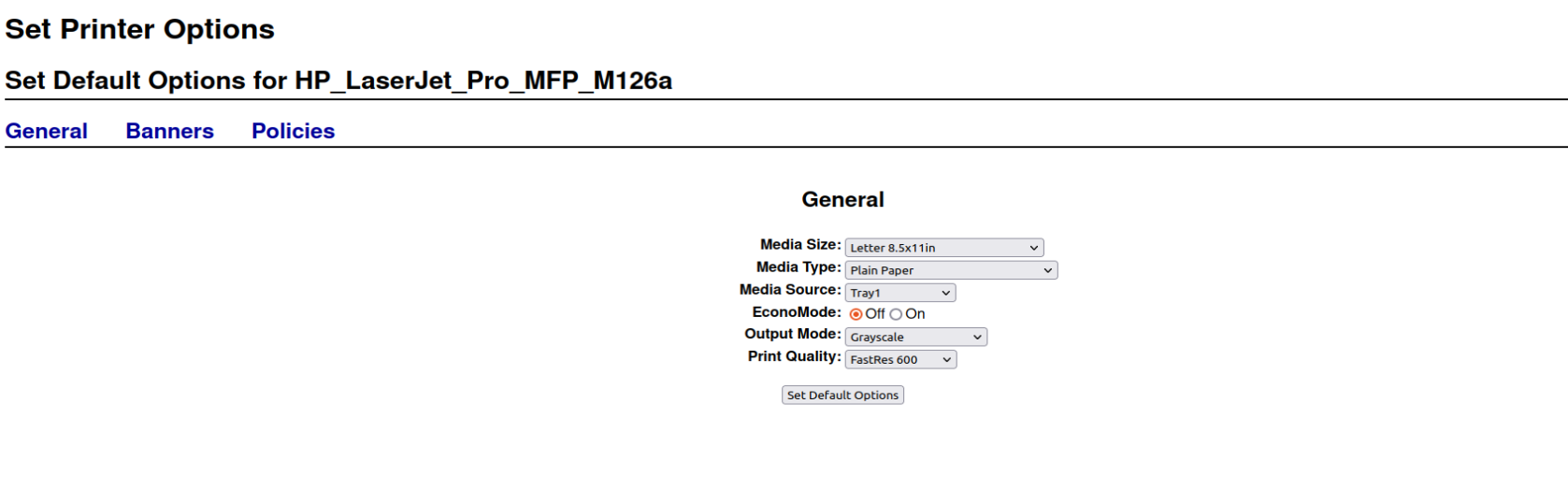
上面是设置打印机的默认参数。可以不做修改直接点击set default option
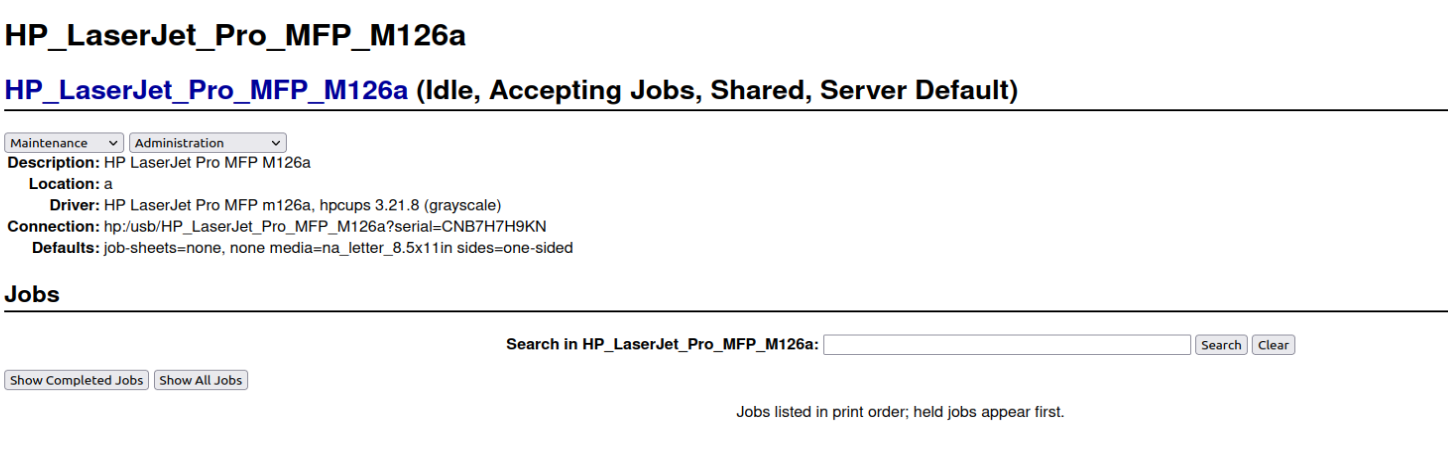
这样打印机就添加完成了,紧接着页面会自动跳转到打印机详情
接着进入到Ubuntu 系统设置, 选择设置中的printer
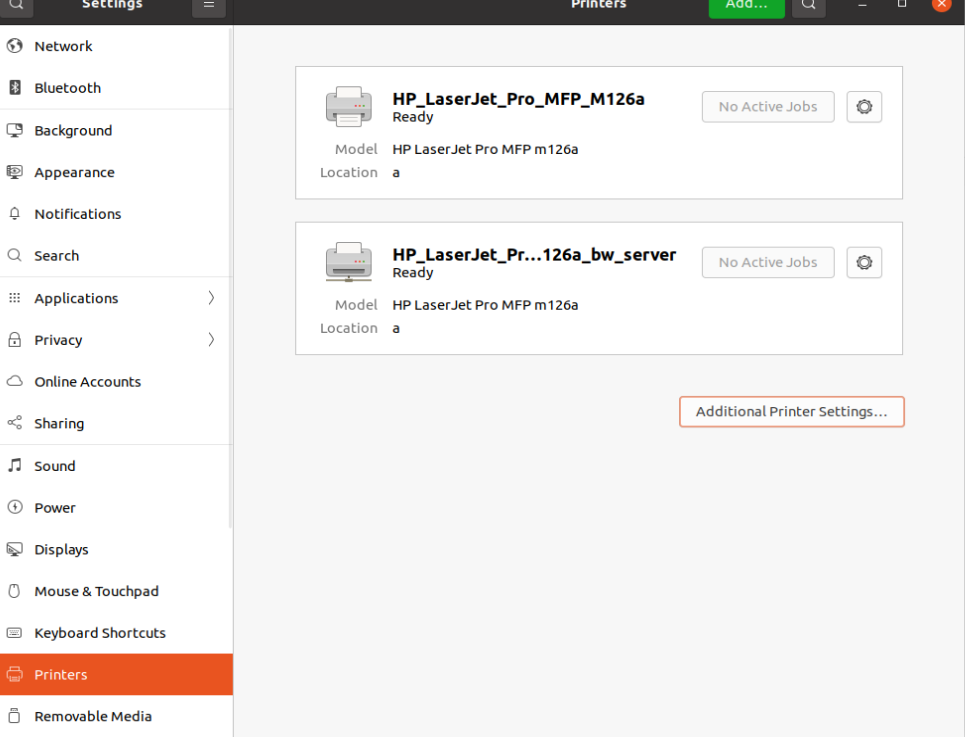
然后点击Addtional Printer Settings,打开打印机额外设置界面
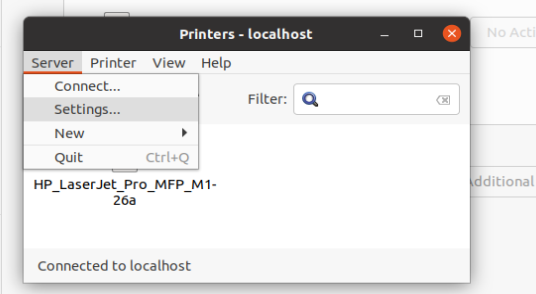
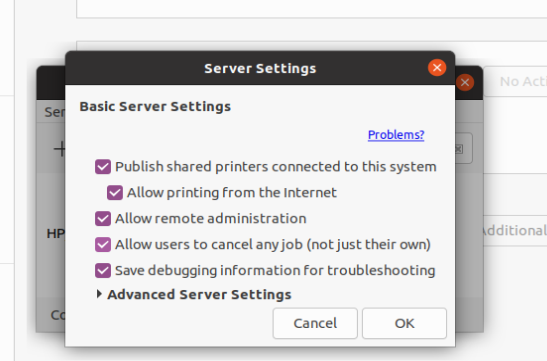
选择其中的Server -> settings, 启用其中的允许网络访问
windows添加共享
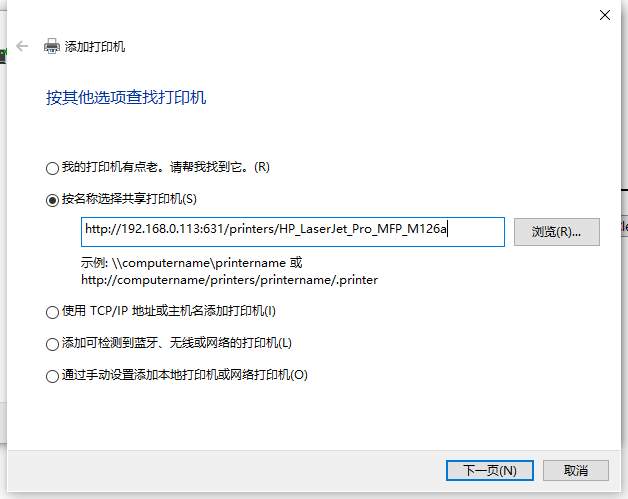
进入控制面板中的设备和打印机
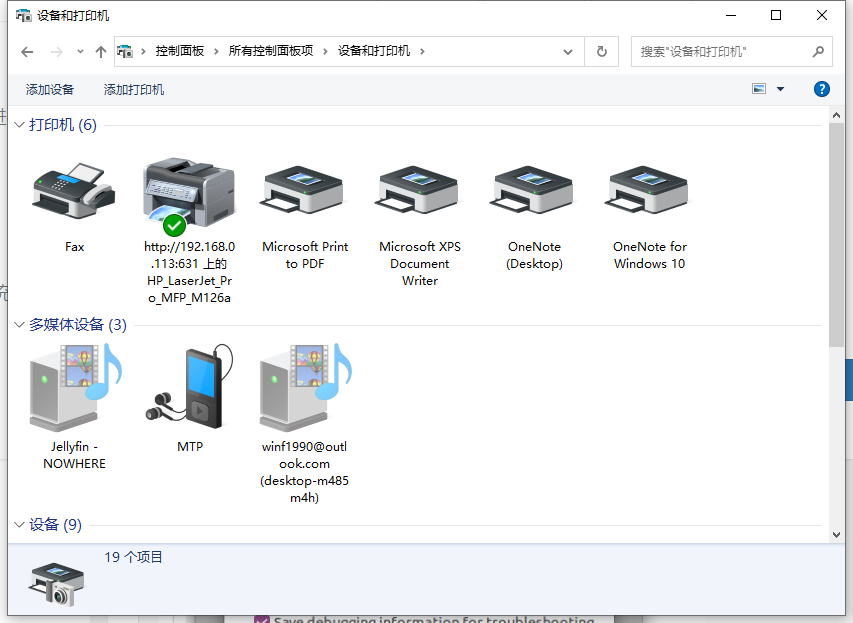
选择添加打印机 正常应该会显示出打印机,如果未显示则选择我所需的打印机未列出。
进入之前的打印机网络管理界面,找到自己的打印机列表
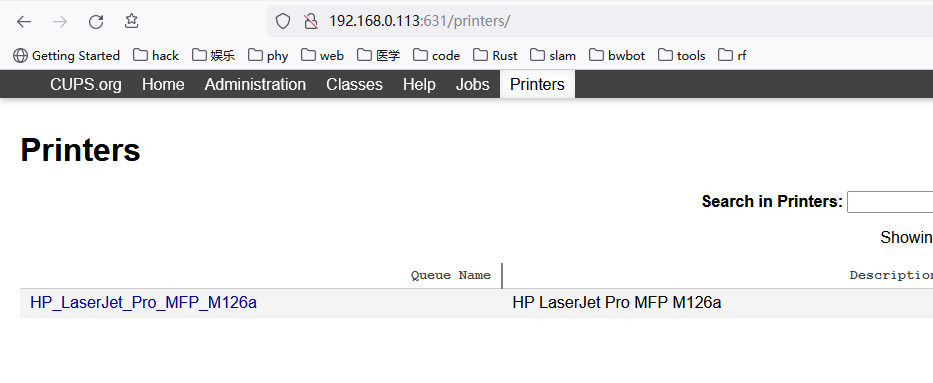
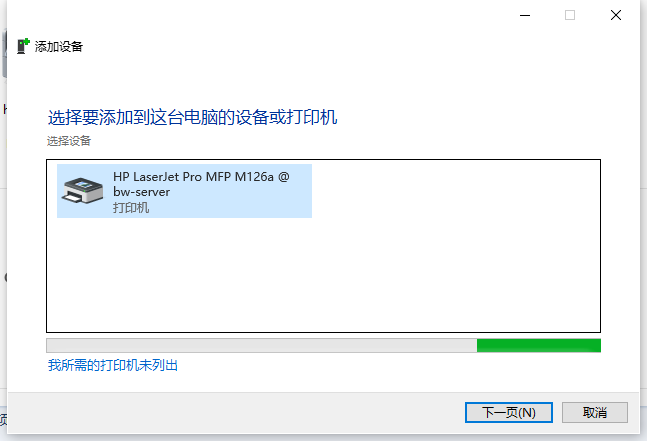
选择自己的打印机
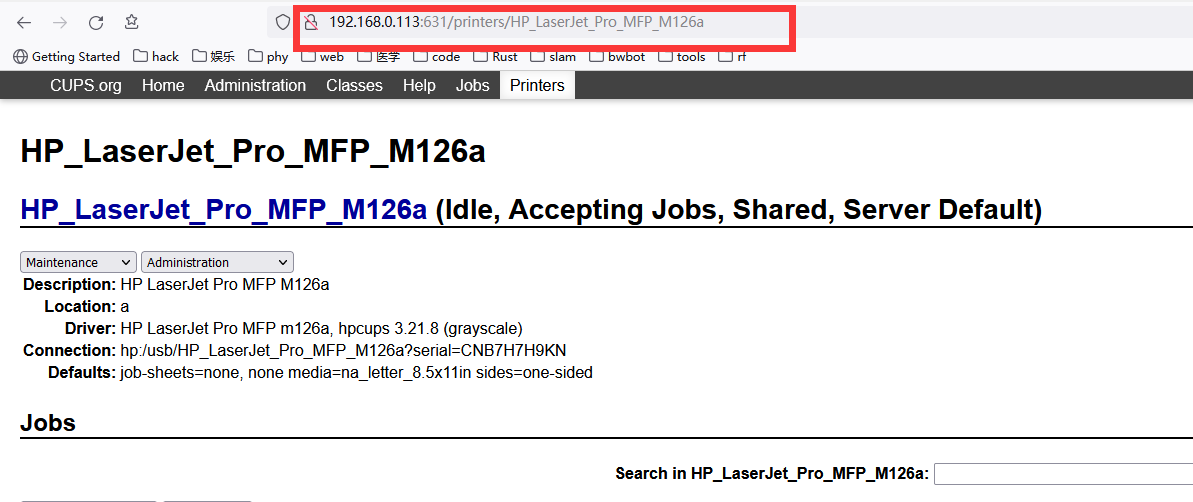
现在浏览器地址栏就是我们需要输入的打印机地址
添加完成后点击下一页,选择对应的打印机品牌和驱动
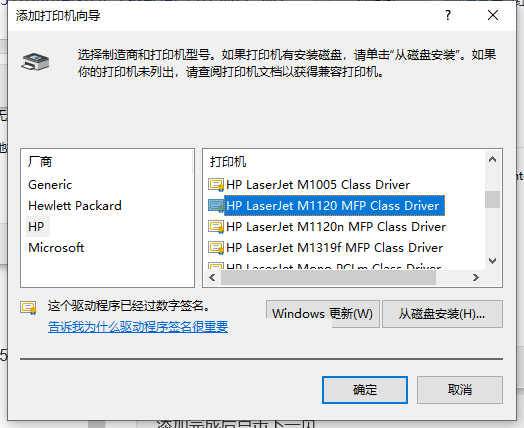
这样就添加成功了

iPhone添加共享
按照以上的设置后iPhone可以直接使用不用手动添加

Android添加共享
Android 需要安装对应的打印APP才能使用
-
RE: 使用xiaoqiang_track进行人体跟随和追踪posted in 技术交流
@huapiaoxiang21 python2.7也可以,只不过这里好像已经移除了。可以直接装pip里面的cpu版本tensorflow
-
Galileo API 日志过大导致系统错误的解决方法posted in 产品服务
首先删除日志文件
rm /home/xiaoqiang/Documents/ros/src/galileo_api/galileo/galileo.log然后更新系统
sudo apt update如果出现错误,可能是由于软件源太老的原因,需要更新软件源
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 sudo apt update执行系统更新指令
sudo apt-fast upgrade -y更新完成后开始更新机器人软件,如果失败可以多次尝试,可能由于网络原因下载失败。
bwupdate更新成功后重启服务
sudo service mongodb restart sudo service startup restart现在机器人应该恢复正常状态了。