@rockyren 非线性优化求解(包括二次规划类),可以用google的Ceres 库,http://ceres-solver.org/nnls_tutorial.html
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
xiaoqiang 发布的最佳帖子
-
RE: ROS中求解二次规划问题发布在 技术交流

-
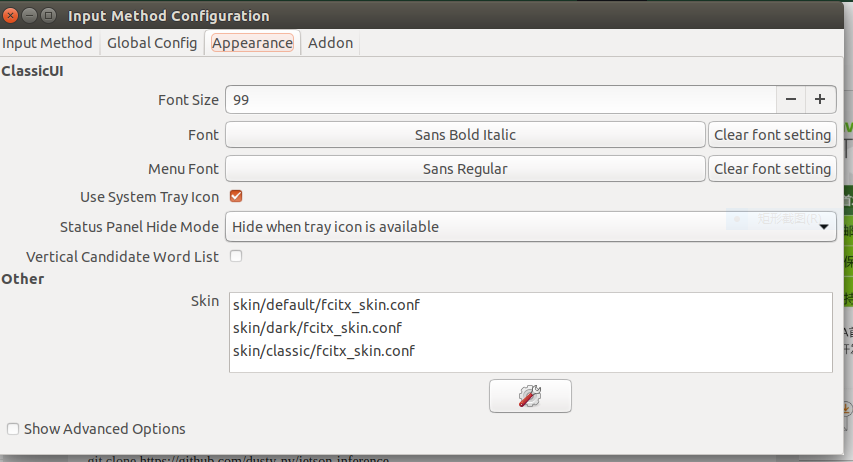
jetson nano fcitx中文输入法 没有提示框和提示框字体太小的解决办法发布在 技术交流
没有提示框,需要卸载一个包。
sudo apt remove fcitx-module-kimpanel提示框字体太小看不清,skin选择classic,同时调整字体大小
-
使用rosbag录制和回放3d激光雷达数据和小强ROS开发平台的里程计IMU数据发布在 激光雷达
用激光雷达进行大范围建图时,为了方便调整建图算法的参数,可以先录制数据包,然后离线回放数据包方式建图。安装有速腾聚创3d激光雷达的小强xq5开发平台,能同时输出3d雷达点云、2d雷达点云、IMU、里程计、图像等数据,结合小车主机配置的高速、高容量固态硬盘,可以录制高质量的数据包,满足各种场景的3d、2d建图。
1.安装无线路由,架设随车wifi网络
小车底盘的“kinect供电”dc头,是通用的直流12v输出电源,可以用来给常用的9V、12V无线路由供电。在小车上固定一个无线路由,我们就可以架设一个随车移动的wifi网络。利用这个wifi网络,我们可以远程控制录制过程和遥控小车移动。
2.在windows笔记本上安装小强开发平台的《伽利略导航客户端安装程序》和ssh客户端
伽利略导航客户端用来方便的遥控小强开发平台,ssh客户端则用于ssh登录小车主机,ssh客户端可以用putty。
3.启动3d激光雷达的ros驱动和pointcloud_to_laserscan包,2020年之后购买的小强设备不需要自己启动请跳过本步骤。
使用wifi网络,在windows笔记本电脑上ssh登录小车主机。小车的IMU、里程计、图像等数据默认是开机自动启动的。
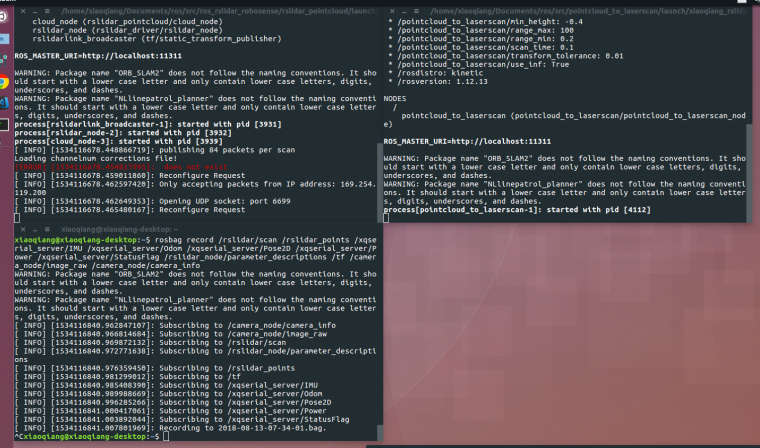
#新开一个ssh连接启动ros驱动 ssh xiaoqiang@192.168.x.x #小车密码为xiaoqiang,请将192.168.x,x换成实际的ip地址 #如果是小强xq5轮毂电机版本,请启动这个launch文件 roslaunch rslidar_pointcloud xiaoqiang_lungu.launch #如果是小强xq4-pro普通电机版本,请启动这个launch文件 roslaunch rslidar_pointcloud xiaoqiang_pro.launch #如果是北科天绘3d激光雷达,请启动下面这个launch文件 roslaunch rfans_driver xiaoqiang_lungu.launch#新开一个ssh连接启动pointcloud_to_laserscan包 ssh xiaoqiang@192.168.x.x #小车密码为xiaoqiang,请将192.168.x,x换成实际的ip地址 roslaunch pointcloud_to_laserscan xiaoqiang_rslidar.launch4.开始录制数据
#新开一个ssh连接启动rosbag录制线程 ssh xiaoqiang@192.168.x.x #小车密码为xiaoqiang,请将192.168.x,x换成实际的ip地址 rosbag record /rslidar/scan /rslidar_points /xqserial_server/IMU /xqserial_server/Odomrosbag的使用方法,[请参考wiki](http://wiki.ros.org/rosbag/Commandline) /rslidar/scan 对应雷达的2d数据 /rslidar_points 对应雷达的3d数据 /xqserial_server/IMU 对应小车的IMU数据 /xqserial_server/Odom 小车的底盘里程计5.使用windows伽利略导航客户端,遥控小车对待建图场景进行扫描。完成后,手动关闭rosbag录制线程
小车的遥控移动轨迹,最好要有多个闭合回路,因为现在的激光雷达slam算法通常都可以使用回环检测技术进一步消除误差。
ctrl+c关闭rosbag录制线程后,在小车home目录会自动生成一个2018-xxx-xxx.bag文件,这个文件就是录制的数据包。
6.用rosbag回放录制的数据包
#先关闭小车上启动的所有的ros驱动节点,因为回放数据包发布的传感器数据会和小车当前数据冲突,因此需要关闭现有的ros驱动节点 #在小车主机上新开一个命令终端 sudo service startup stop roscore#用rosbag回放数据包 #在小车主机上新开一个命令终端 sudo service startup stop rosbag play 2018-08-11-13-20-34.bag #请将 2018-08-11-13-20-34.bag替换成实际bag包名字一切正常的话,数据包里录制的话题数据就已经在ros中发布了,可以使用rostopic工具查看,也可以用rviz订阅。
还可以使用rqt_bag可视化工具打开bag数据包,rqt_bag可以方便的浏览、可视化bag包内容。
-
RE: GPS在ROS中的测试和使用发布在 ROS教程
如果运行gpsd时出现, 这种错误 can’t bind to IPV4 port gpsd,Address already in use。可能是因为后台在执行gpsd这个服务,把它关闭掉再尝试运行。
sudo service gpsd stop gpsd -D 5 -n -N -b /dev/bwgps