ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
小强ROS机器人教程(22)_操作6自由度机械臂
-
不知道这里怎么上传,我用邮箱发给你吧。好像是要把原来的hid先卸载再复制新的hid.so到/usr/local/lib/python2.7/dist-packages@kadian
-
试了,还是open failed@weijiz
-
@Arieszzh 好的,这是我邮箱864878984@qq.com,谢谢
-
您好,请问这款机械臂有stm32控制的代码吗
-
@qdnbbv 有代码在资料包里面
-
您好,想问一下爪子这个电机之前用到过热,然后再用反应就不够灵敏了,是电机烧了吗还是爪子自己的问题。
如果更换电机可以机械臂内部更换吗,比如说把最下部电机和爪子电机互换。@xiaoqiang @kadian -
@Arieszzh 根据舵机上的型号标签,如果相同则可以替换,不同的话可以淘宝一款相同型号的电机进行替换
-
你好,请问打开控制板开关之后,搜索不到蓝牙信号是怎么回事?
-
@Wallong 不用蓝牙,用usb
-
@frank 嗯usb可以用
蓝牙那个主要是Android 6.0之后,访问硬件设备需要位置权限,app没有在AndroidManifest.xml内注册,手动赋予权限就行了。 -
在运行robot_arm/move.py时,出现了无法打开device 的问题,如图所示:
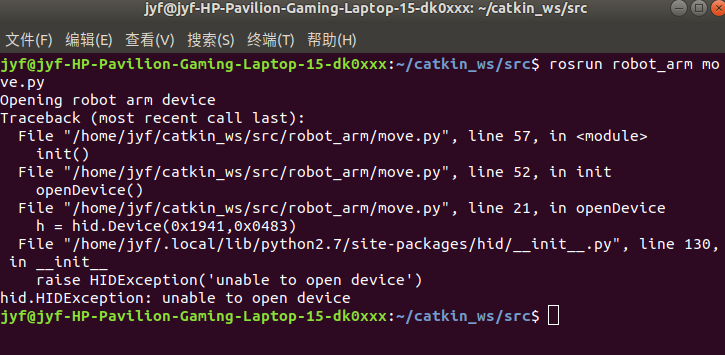
怎么解决?hid已经装过了,VID、PID已经改过了,没有问题,到底怎么解决呢,求助 -
@fly19955736 sudo apt-get remove fwupd 这条卸载指令有没有执行过,udev规则有没有设置,lsusb能不能看到这个hid设备
-
@xiaoqiang udev规则文件可以用这个http://git.bwbot.org/publish/xiaoqiang-cmds/-/blob/xq5/etc/arm-hid.rules
-
@xiaoqiang 第一条已经执行过了,后面那个已经把您给的链接文件下载下来了,不知道该怎么用这个文件呢,lsusb后可以查看到VID PID,但是就是连接不上设备
-
@xiaoqiang 这个文件我已经下载下来放到/etc/udev/rule.d文件夹下了,还是不起效果
-
@fly19955736 可以安装小强镜像试一下,镜像里面是配置好的,https://community.bwbot.org/topic/232/蓝鲸ros镜像发布/27
-
@xiaoqiang 除了用镜像就没有其他办法了嘛

-
@fly19955736 办法都已经告诉你了,反思操作
-
@kadian 请问您有这个机械臂的模型文件吗?
-
@鲸鱼 没有模型