ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
loam_velodyne使用速腾聚创16线激光雷达建图和计算激光雷达里程计
-
loam_velodyne 是业界比较有名的一个3d 激光雷达slam包,它不以常规的3d icp策略而以3d雷达点云特征点为主要匹配方式,结合IMU实现实时地计算高精度的6自由度激光雷达里程计,在此基础上再结合3d icp得到高精度地图点云数据。
1. 数据包准备
loam_velodyne包原始作者是针对vlp-16激光雷达设置的,我们测试发现它对其他平台的IMU数据兼容性不好,在下文的建图过程,我们只使用速腾聚创3d激光雷达输出的三维点云数据进行测试,不使用小强开发平台的IMU。
测试结果发现因为没有IMU,loam_velodyne对剧烈晃动、快速转向适应性差,为了得到好的结果,需要保证运动的平稳、匀速。同时雷达输出点云的速率提升到20HZ后,slam效果也有提高。20hz的设置需要使用windows配置软件设置。rosbag数据包的详细制作过程,请参考这篇教程: https://community.bwbot.org/topic/522/使用rosbag录制和回放3d激光雷达数据和小强ros开发平台的里程计imu数据
下文教程将以蓝鲸机器人录制的bag包为例,演示如何使用loam_velodyne包得到激光雷达里程计。bag包百度云下载地址2. 配置安装loam_velodyne
#需要安装到ros工作空间,以小强主机为例 cd ~/Documents/ros/src git clone https://github.com/BluewhaleRobot/loam_velodyne.git cd .. catkin_make3. 启动loam_velodyne 开始建图
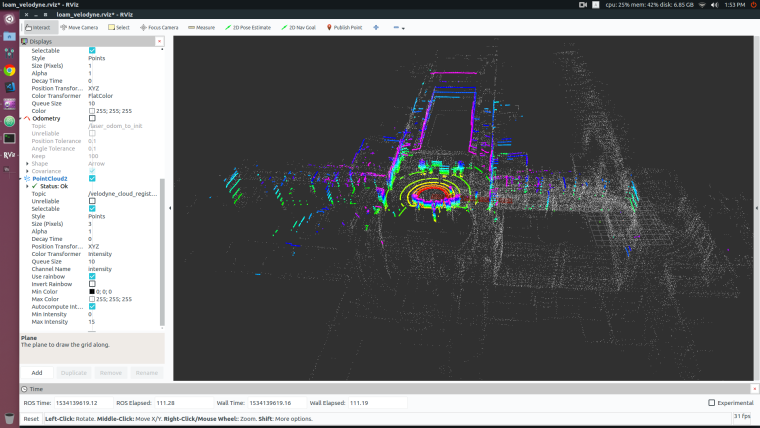
#先关闭小车的ros启动节点 #在小车主机上新开一个命令终端 sudo service startup stop roscore#启动loam节点 #在小车主机上新开一个命令终端 roslaunch loam_velodyne xiaoqiang_lungu_off.launch#播放bag数据 #在小车主机上新开一个命令终端 rosbag play -s 200 2018-08-11-13-20-34.bag #从200秒开始播放数据,这段数据比较好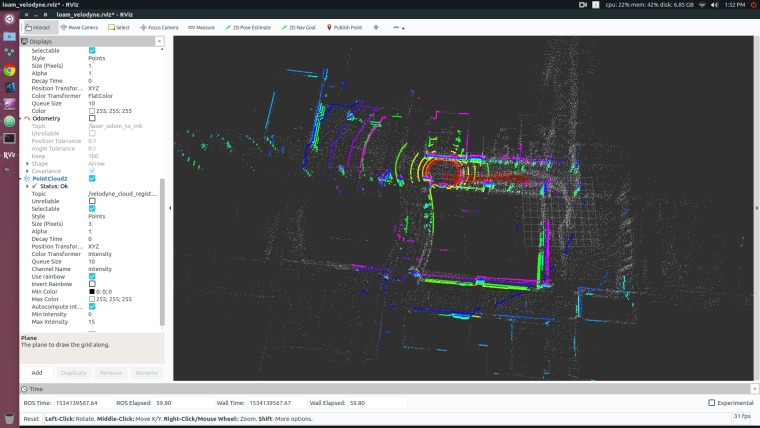
-
刚好最近在用,收藏了
-
怎么利用这个建图的结果?仅仅是用loam_velodyne这个算法建图吗?
-
@道灼 定位啊,导航啊
-
@yangoogle Ok
这里面是可以添加我自己对目标物的检测感知代码吧? -
你好大神,请问我用速腾的16线激光雷达,我订阅的话题是rslidar_points话题,怎么得到的图却很差,都看不清啥是啥?要改什么吗?
-
@jaccica 建图移动过程要保持平稳
-
@xiaoqiang 我的机器人是地面机器人,在移动过程中理应是平稳的吧。我是用的laboshinl的代码,而发现你的代码与laboshinl的代码有点区别,请问是代码的原因吗?谢谢!
-
@jaccica 应该不是代码的问题,这里的平稳是指不能有急转弯,即转弯半径要大,同时尽量保持匀速运动,还有雷达扫描频率越快越好,上面教程是20hz。
-
@xiaoqiang 我觉得还是代码的问题,我录制的一个bag包别人跑很正常,我这里就看不出个啥样子。
-
@Yangoogle 怎么进行定位和导航啊?定位是里程计定位?还是跟建图回来的3D地图进行匹配定位?导航是跟2D环境下,用amcl定位导航一样吗?
-
@MUZUIXIAOHAI 可以先处理成2D的用AMCL
-
此回复已被删除! -
运行过程中出现这个什么原因呢?
[multiScanRegistration-3] process has died [pid 5359, exit code -11, cmd /home/bai/catkin1_ws/devel/lib/loam_velodyne/multiScanRegistration /multi_scan_points:=/rslidar_points __name:=multiScanRegistration __log:=/home/bai/.ros/log/5d4cdf7a-2037-11e9-83d2-1c4d70a32195/multiScanRegistration-3.log].
log file: /home/bai/.ros/log/5d4cdf7a-2037-11e9-83d2-1c4d70a32195/multiScanRegistration-3*.log -
max intensity 是-999999,min intensity是999999,有人遇到过这种问题吗?
-
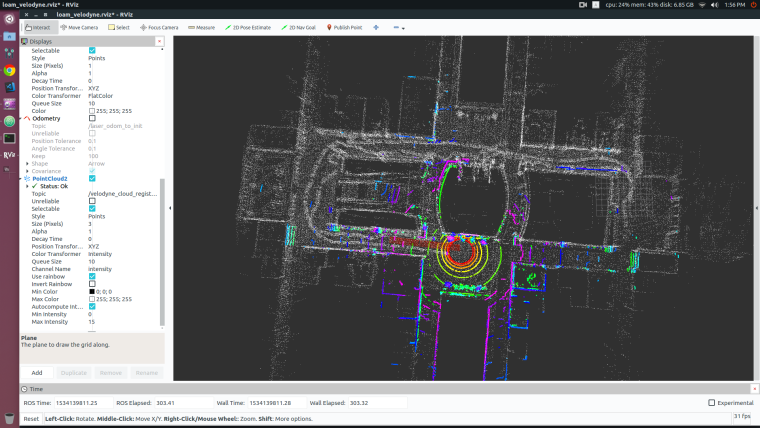
为什么建出来点云地图这么稀疏呢 是需要配置rviz吗
-
@ranzhu-uestcer rviz里面可以把点云显示大小调大一些,这样视觉效果上会更有稠密感
-
@MUZUIXIAOHAI 你好,请问你对于这里的3D定位导航确定了一个框架了吗?
-
您好,想请教一下,我按照文章的步骤下载了源码数据包,但是建图过程时不时偏移一定角度,导致整张图杂乱的重叠在一起,楼主有没有遇到过同样的问题? 是不是和激光频率有关(数据包是10Hz)?还是和电脑的处理能力有关?
-
@Angel 都有一定关系,loam算法已经太老了,可以试试lego_loam