ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
小强AMCL导航,可以自主定位吗?为什么rviz里每次都需要手动定位(2d pose estimate)才可以?
-
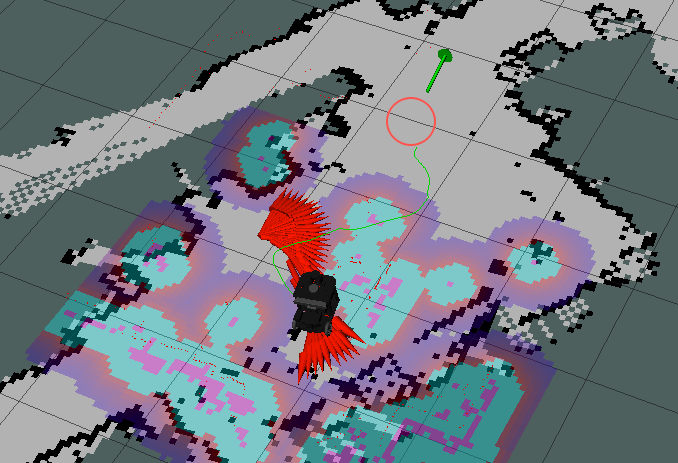
如图,如果在rviz里没有手动定位,小车模型在rviz里的初始位置无法自动定位,
而且指定目标点后,实际上小车已经移动到了指定的红圈位置。但小车模型在rviz的位置还是错的。请帮忙看看哪里有问题?谢谢。
-
@山中客 amcl算法就是这样的,需要手动指定初始位置。
-
感谢回复,如果考虑具体的产品实现,amcl导航的初始定位就必须借助其他算法或方案来完成,是吗?
常见的处理方式有哪些? -
@山中客 雷达导航就是有天生的缺陷,可以了解视觉导航,这个是我们的视觉导航解决方案,没有你说的问题
-
@Yangoogle 感谢提示,现在正在学习和调试slam 和导航的技术,计划是从激光slam 入手,后面再搞vslam.
-
请问有什么其他的单线激光雷达算法可以解决这个问题吗?
-
@eee 试试cartographer的重定位
-
@xiaoqiang 这个好像不行,还是跟amcl一样