@weijiz 刚才突然试出来了,直接执行这个就会调用gazebo,但是遥控的时候小车总是漂移,比如按右键右转,模拟出来的小强就会突然猛左转一下再慢慢右转
roslaunch startup startup_sim.launch
@weijiz 刚才突然试出来了,直接执行这个就会调用gazebo,但是遥控的时候小车总是漂移,比如按右键右转,模拟出来的小强就会突然猛左转一下再慢慢右转
roslaunch startup startup_sim.launch
@weijiz 我的系统是xq4-noetic,用的小强官方那个noetic默认镜像,请问大致步骤是这样嘛,如果有不对的地方希望提供意见,因为目前如下操作的话office.world里模拟出来的小车无法用/cmd_vel来控制,rviz里各项topic的订阅结果也不对:
rosrun robot_upstart install startup/launch/startup_sim.launch
cd ~/Documents/ros/src/xiaoqiang_urdf
git checkout xq4-sim
cd ~/Documents/ros
catkin_make
roslaunch xiaoqiang_urdf gazebo.launch
在仓库中找到了xiaoqiang_urdf的相关文件,找到了gazebo.launch,但是启动后不知道该利用哪个topic来控制仿真运动和建图,诚恳请教指路
@xiaoqiang 在 伽利略客户端导航使用问题 中说:
1.机器是什么型号,点击目标点开始按钮后,按钮会变成暂停吗,2.检查红色路线是否有断点(路线可以交叉,但不可以断开)。3.在绘制导航路径界面检查当前路径的循环方向(要设成双向)。4.如果还是不行,手动启动startup,开启导航后,客户端发送导航目标点,截图launch文件运行窗口的输出信息。
1.机器是xq4-pro,点击目标点开始按钮后,按钮不会变成暂停
2.红色路线没有断点,我试了下只有一条直线也是无法运行。
3.导航点已全部设成双向。
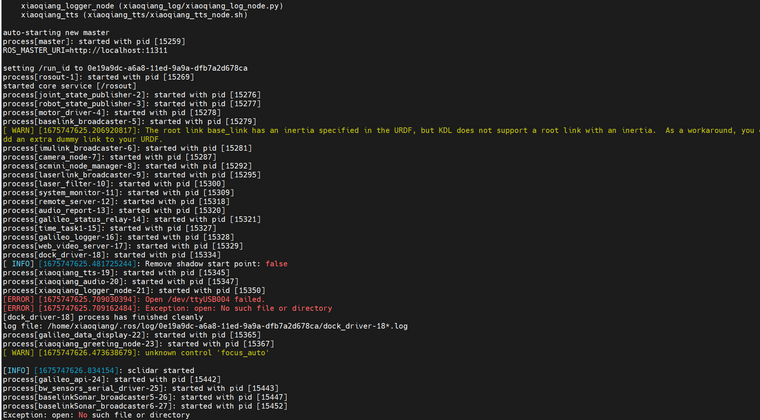
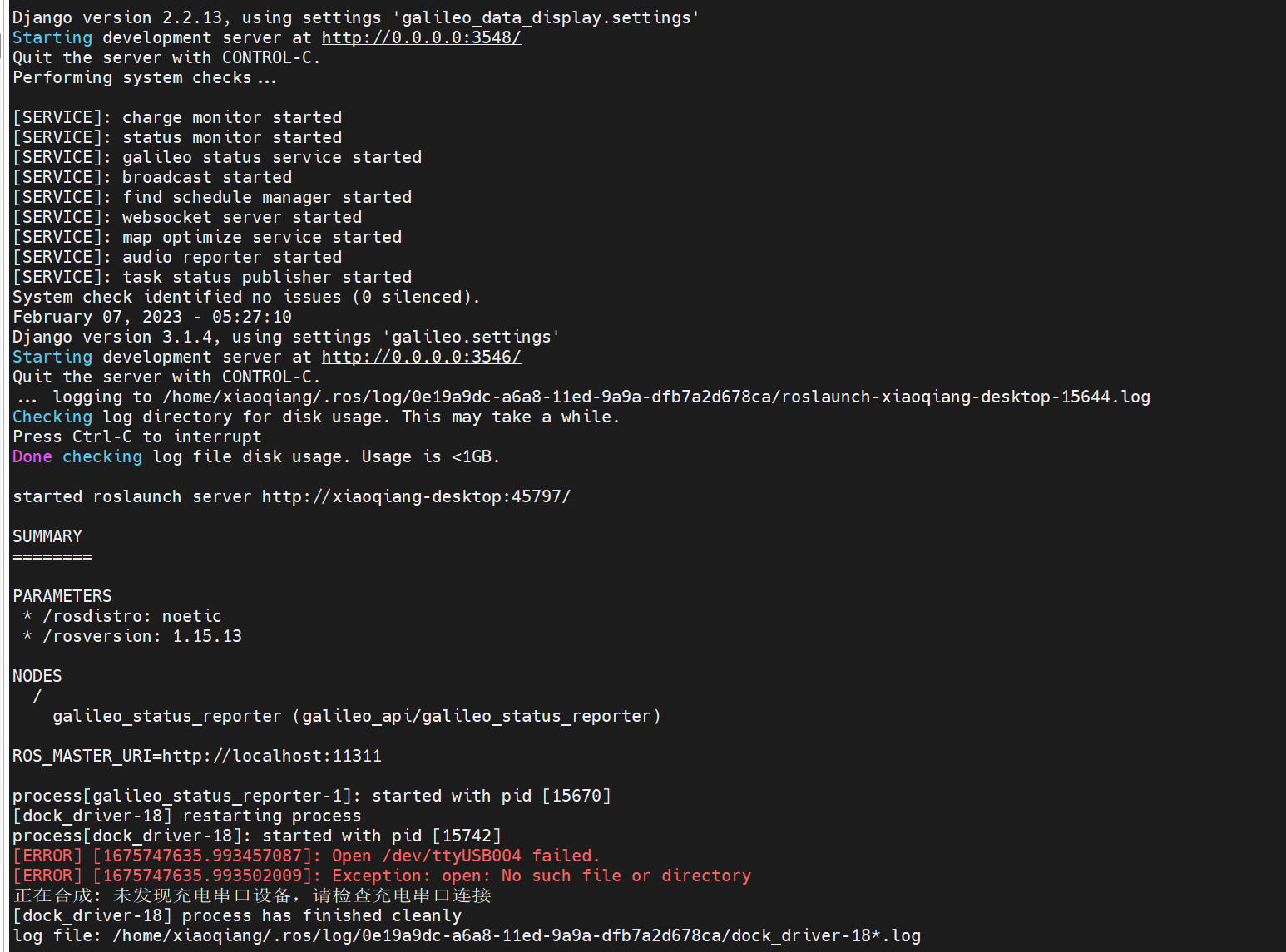
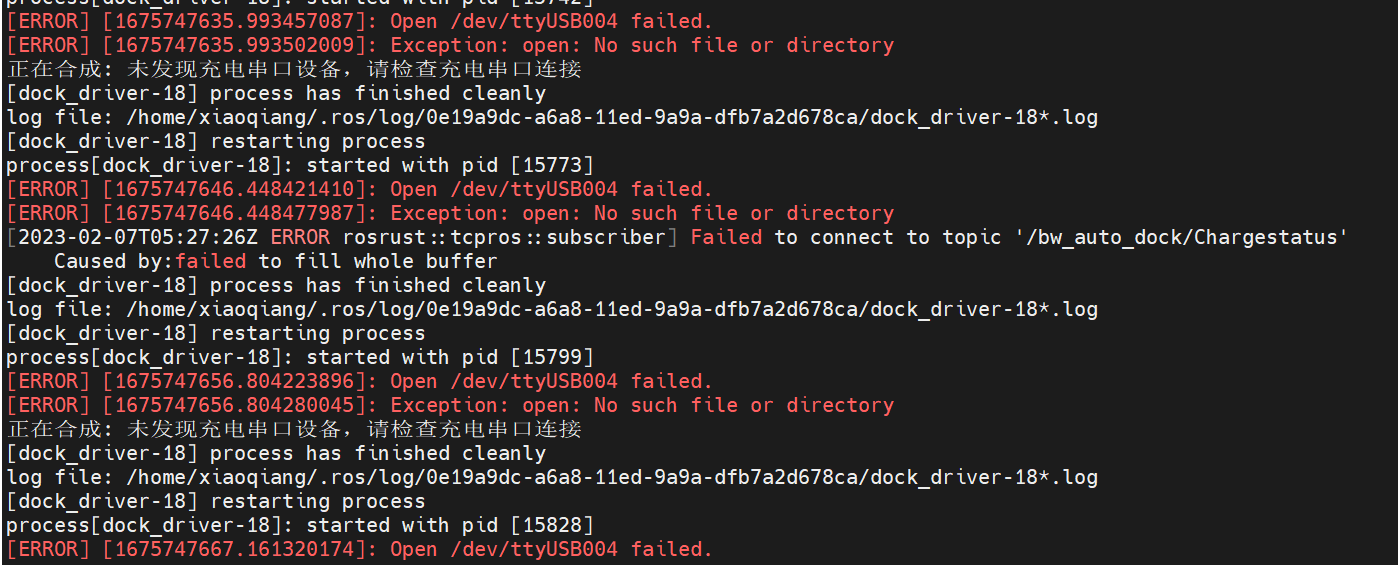
4.输出信息:这些信息是连续的,往后都是循环的一个充电串口的报错
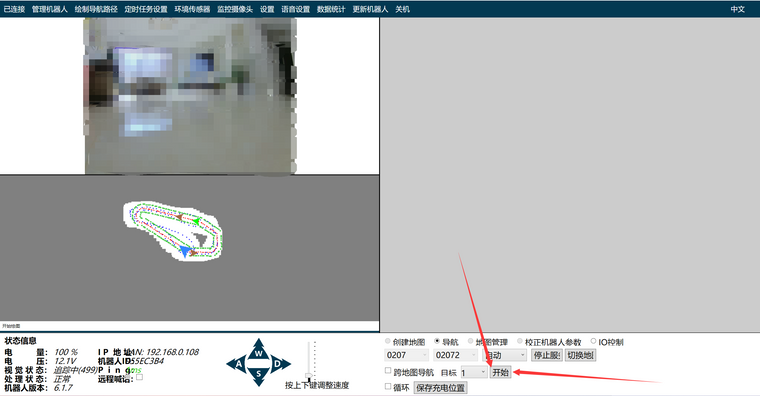
建图,摄像头,遥控都没有问题,但是绘制好路径开启导航后,无法向目标点移动,点击图中箭头所指的 “开始” 按键没有任何反应,但是地图精度通过遥控来看还是非常准确的,请问该如何驶向导航点呢?
请教一下,最近自己在做个送餐车项目,想在伽利略导航系统的基础上,再利用一个USB串口添加一个控制板来传输货柜是否放好物品的信息,来确保车辆以载有货物的前提下才能启动导航,如果不借助网络只想在车内部使用TOPIC完全本地进行判断的话,该如何修改功能包galileo_api里的内容来实现这个类似运行前if判断的功能呢?
Ps: 型号是xq4,galileo版本是4.5.1,用http协议来调用伽利略的api。