在小车运动过程中小车实际的位置和在RVIZ上显示的位置在多次行走之后会积累误差 - 请问这个问题大家是如何解决的?谢谢!
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
weijiafeng 发布的帖子
-
如何处理激光雷达靠近玻璃墙时生成的噪点?发布在 激光雷达
激光雷达在狭长玻璃走廊行进过程中由于光遇到玻璃时反射而影响激光雷达从而生成噪点 - 想问这问题大家是如何解决的呢?(除去在玻璃墙贴纸这种方法)。谢谢!
-
机器人巡航过程中的Off Map问题发布在 技术交流
最近用激光雷达+超声波的配置,基于DWA Planner做的定点巡航测试时,发现机器人能够顺利到达第一个目的地,但第二个目的地开始巡航不久之后终端便显示Off Map警告和Got New Plan,最后:
[ INFO] [1558417522.391535270]: Got new plan
[ WARN] [1558417522.445309688]: Off Map -9.047274, 3.753656
[ WARN] [1558417522.445398351]: Off Map -9.035941, 3.792092
[ WARN] [1558417522.617827475]: Off Map -8.999582, 3.749707
[ WARN] [1558417522.619535975]: Off Map -8.977195, 3.737232
。。。最后出现了error并撞玻璃了:
[ WARN] [1558417532.499967676]: DWA planner failed to produce path.
[ERROR] [1558417532.546289430]: Failed to get a plan.
[ WARN] [1558417537.591407688]: Clearing costmap to unstuck robot (3.000000m).[ERROR] [1558417547.791319437]: Aborting because a valid plan could not be found. Even after executing all recovery behaviors
[ERROR] [1558417547.811424]: Goal failed with error code:ABORTED想问下这个是不是行进过程中误差积累的问题?跟AMCL定位或者雷达的配置有关吗?如何解决呢?谢谢!
-
RE: 如何让机器人行进过程中头朝前发布在 技术交流
@weijiz 报错内容: Failed to create the teb_local_planner/TebLocalPlannerROS planner, are you sure it is properly registered and that the containing library is built? Exception: According to the loaded plugin descriptions the class teb_local_planner/TebLocalPlannerROS with base class type nav_core::BaseLocalPlanner does not exist. Declared types are base_local_planner/TrajectoryPlannerROS dwa_local_planner/DWAPlannerROS
-
RE: 如何让机器人行进过程中头朝前发布在 技术交流
@weijiz dwa貌似没有禁用后退的参数?我想用teb_local_planner但报错了: - 请问base_local_planner支持teb_local_planner吗?
-
如何让机器人行进过程中头朝前发布在 技术交流
您好,我最近在做巡航测试时发现当机器人initial pose在目标点前面时,机器人“倒着走”,我希望机器人先调个头再正着走到目标点,请问这个需要在ROS哪个模块改动呢?
-
RE: 小强ROS机器人教程(10)___使用kinect进行自主移动避障发布在 产品服务
@weijiz 想问下大家在用Intel RealSense深度摄像头作避障时有遇到深度数据缺失、数据误差以及测量环境要求高的问题吗?是怎么解决的?谢谢!
-
RE: 小强ROS机器人教程(10)___使用kinect进行自主移动避障发布在 产品服务
@frank 想问下大家在用Intel RealSense深度摄像头作避障时有遇到深度数据缺失、数据误差以及测量环境要求高的问题吗?是怎么解决的?谢谢!
-
主控的配置(CPU和内存)会影响机器人的避障性能吗?发布在 技术交流
最近用激光雷达+超声波做避障时发现在比较狭窄/障碍物较多的空间里面,障碍物未能及时地(时滞大概一秒)反映在costmap上面,导致机器人会撞到障碍物。所以想问问这个问题可以如何解决呢?可以通过调整costmap clearing的参数来解决吗?(如何调?)如果不行的话,提升主控的CPU/内存有用吗?谢谢!
-
RE: 如何修改超声波launch文件中每个超声波的 tf 值?发布在 技术交流
@weijiz 我想问传感器向ROS发布数据的频率在哪里设定?你们家的超声波产生数据的频率是多少?是不是发布数据频率的设定的值越高costmap就越精确?不高于超声波产生数据的频率
-
RE: 如何修改超声波launch文件中每个超声波的 tf 值?发布在 技术交流
@Yangoogle 哦哦好的。那什么叫触发信号呢?如果超声波和深度摄像头一起做避障,各自辨别的障碍物分别有什么特点呢?激光雷达也做避障吗?
-
RE: 如何修改超声波launch文件中每个超声波的 tf 值?发布在 技术交流
@weijiz 哦哦,什么叫触发信号?那做避障的话除了激光雷达一般再加上视觉来做吗?视觉一般是用单目还是深度摄像头比较多?
-
RE: 如何修改超声波launch文件中每个超声波的 tf 值?发布在 技术交流
@weijiz 谢谢!还想问下 - 如何判断超声波的tf值已改正确?如果不正确的话小车运动过程中会出现什么情况?- cost map超声波层的障碍物定位不准?
-
如何修改超声波launch文件中每个超声波的 tf 值?发布在 技术交流
淘宝购买了蓝鲸的超声波产品后看到bw_sensors.launch这个文件中有设定每个超声波的 tf 值, 例如:
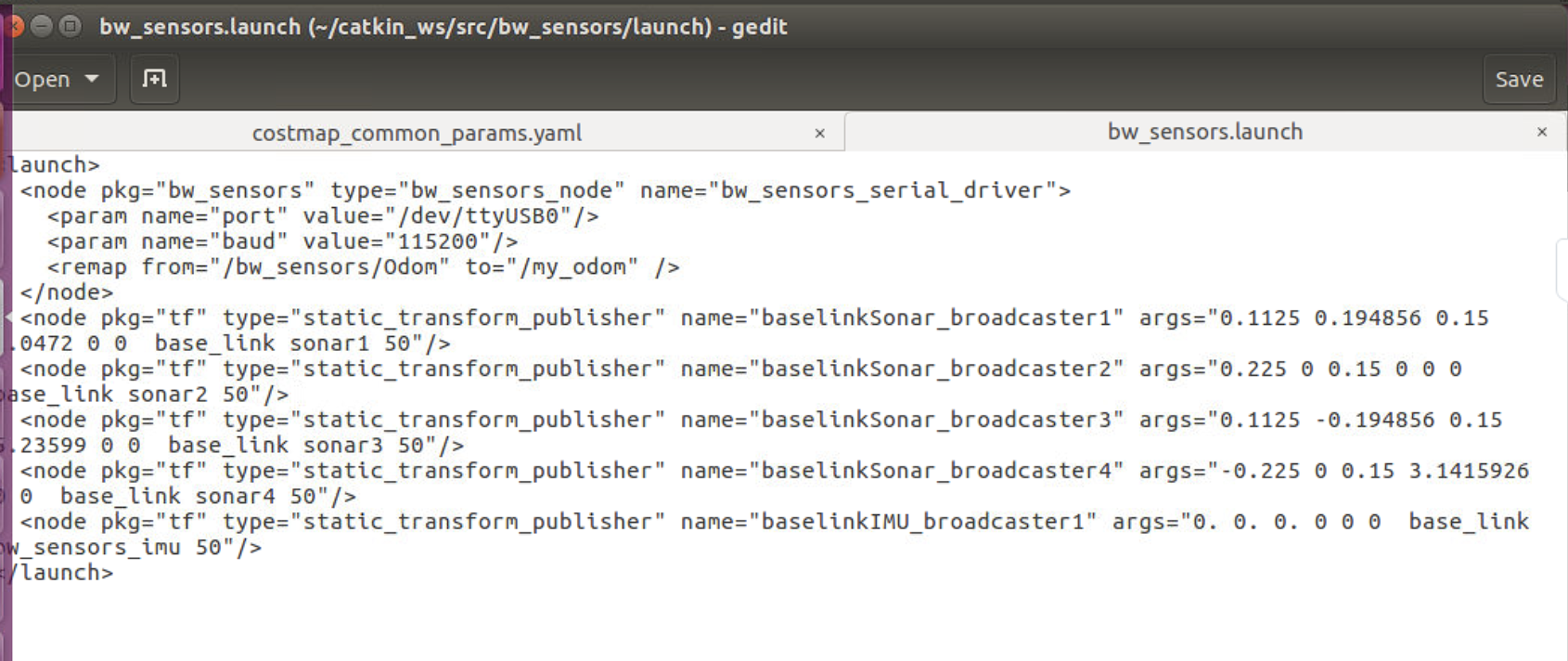 。
。想问下这个tf值是怎么算出来的?这需要根据自己小车的床长宽高进行修改吗?谢谢!