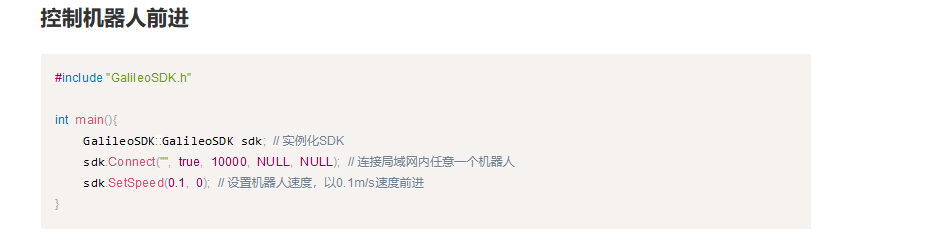
@yangap 设置一次后会始终保持这个速度运行,直到收到新的速度指令
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
Posts made by weijiz
-
RE: 有没有开源方案可以边SLAM建图边自主移动呢?posted in 激光雷达
@jasen 可以自己写一个。地图信息是知道的,哪些是未知区域也是知道的。可以让机器人自动移动到未知区域。这种自动建图的使用场景不多。机器人很容易移动到目标区域外边,比如想让机器人在家里扫地。很容易就走出门了。

-
RE: 请问用小强和LDS-01激光雷达可以进行二维建图吗?posted in 激光雷达
@vvhahaha 在 请问用小强和LDS-01激光雷达可以进行二维建图吗? 中说:
hls_lfcd_lds_driver
执行
catkin_make -DCATKIN_WHITELIST_PACKAGES=hls_lfcd_lds_driver
-
RE: 请问用小强和LDS-01激光雷达可以进行二维建图吗?posted in 激光雷达
@vvhahaha 可能是没安装好,我也不确定。你可以自己源码安装试试 https://github.com/ROBOTIS-GIT/hls_lfcd_lds_driver
-
拉格朗日调度系统发布posted in 蓝鲸智能大事记
2019.11.21
拉格朗日调度系统是一个优秀的机器人调度系统。具有动态路径资源分配,机器人管理,地图管理等功能。拉格朗日调度系统配合伽利略导航系统使用,可以实现多机器人协同工作。以更高的效率执行用户发布的任务。详情请参考拉格朗日调度系统文档。
-
蓝鲸巡检机器人助力保障石油开采安全posted in 蓝鲸智能大事记
2019.10.01
油田及炼油厂等石油相关场所由于存在大量可燃物,对于安全检查与监控要求十分严格。石油工人们每天需要不停在关键位置进行巡逻和抄表。这种重复性工作不仅是对人力资源的浪费,同时对巡检工人也具有一定的危险性。蓝鲸巡检机器人搭载高清网络摄像头,能够清楚的看到油厂仪表数据。同时机器人上还搭载了烟雾传感器和可燃气体传感器。工人们可以通过网络远程遥控机器人或者设置机器人自动巡逻。当机器人检测到环境异常时会发出警报,第一时间通知有关人员。在蓝鲸巡检机器人的帮助下,石油的生产变得更加安全可靠。目前我们的巡检机器人已经大量部署在大庆油田中。
-
伽利略导航系统助力国产送餐机器人进入欧洲市场posted in 蓝鲸智能大事记
2019.06.20
采用了伽利略导航系统的送餐机器人,成功进入欧洲市场,并受消费者广泛好评。由于采用视觉无轨导航方式,此机器人使用简单方便,无需对环境进行改造。同时在人比较多时也能正常稳定的工作。此机器人成为餐厅的好帮手。
看看欧洲客户们的反应吧
-
伽利略导航系统HTTP API发布了posted in 蓝鲸智能大事记
2019.11.20
在发布伽利略SDK之后,用户一直反馈需要HTTP协议的伽利略API。现在它终于发布了。详细软件包可以从这里下载安装。通过HTTP API我们可以控制机器人导航,比运动到环境中的某个位置。还可以控制机器人创建地图,遥控,自动充电等等。同时为了方便用户控制机器人实现一连串动作,我们引入了任务的概念。一个任务可以包含多个动作。比如控制机器人到某点然后说一句话。目前协议文档还没有编写完成。具体使用请等待发布的API文档。
-
RE: 蓝鲸ROS镜像发布posted in 产品服务
@Jockey 这个没有提供日志。sdk自己会有log信息。同时sdk发布的消息实际上发送到了 /galileo/cmds 话题。可以监控此话题收到的数据。sdk相关的问题请在sdk相关的帖子内回复,或另开一个帖子。
-
RE: 小强出现了问题posted in 产品服务
@YuBicheng 可以运行bwcheck自检一下。
你是不是重装系统了,小强默认的计算机名是xiaoqiang-desktop而你的是xiaoqiang