ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
weijiz 发布的帖子
-
RE: 我在循迹路上打了一些点,小车在循迹过程中遇到这些点就执行操作,可以怎么实现?发布在 技术交流
@yolic66 在 我在循迹路上打了一些点,小车在循迹过程中遇到这些点就执行操作,可以怎么实现? 中说:
请问大佬们有什么建议吗
你是用movebase做的吗,操作点可以设置成导航目标点。不过movebase内部判断是否到达也是你说的那么算的

-
windows游戏手柄映射工具发布在 技术交流
对于一般的游戏手柄,插到windows电脑上一般会被识别乘hid游戏设备。
但是C#中使用DirectInput或者xInput的库都没办法操作hid设备。这两个库都只能操作xbox手柄。所以想要实现在WPF程序中通过手柄操控就需要把hid手柄映射成xbox手柄。这个映射可以通过XOutput库来实现。
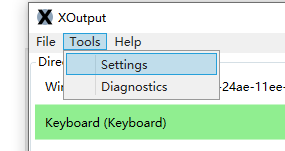
安装之后打开设置界面
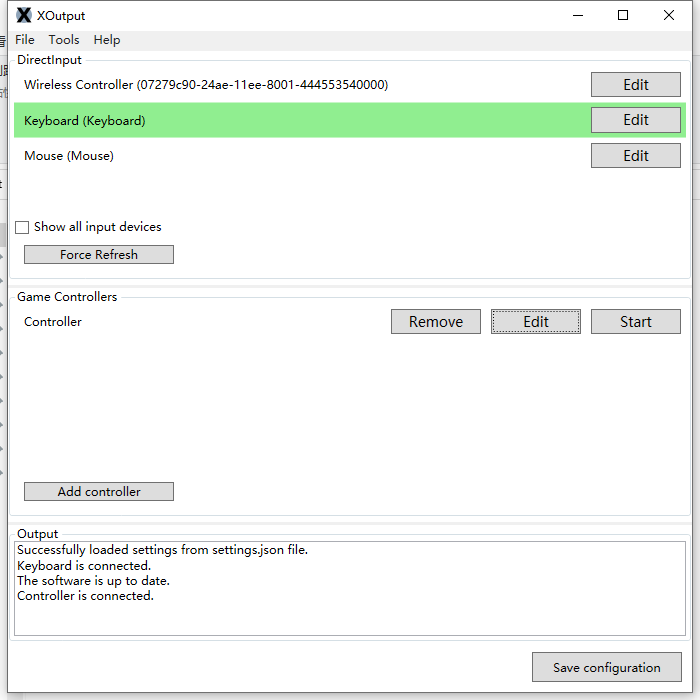
添加手柄后选择对应的Edit按钮
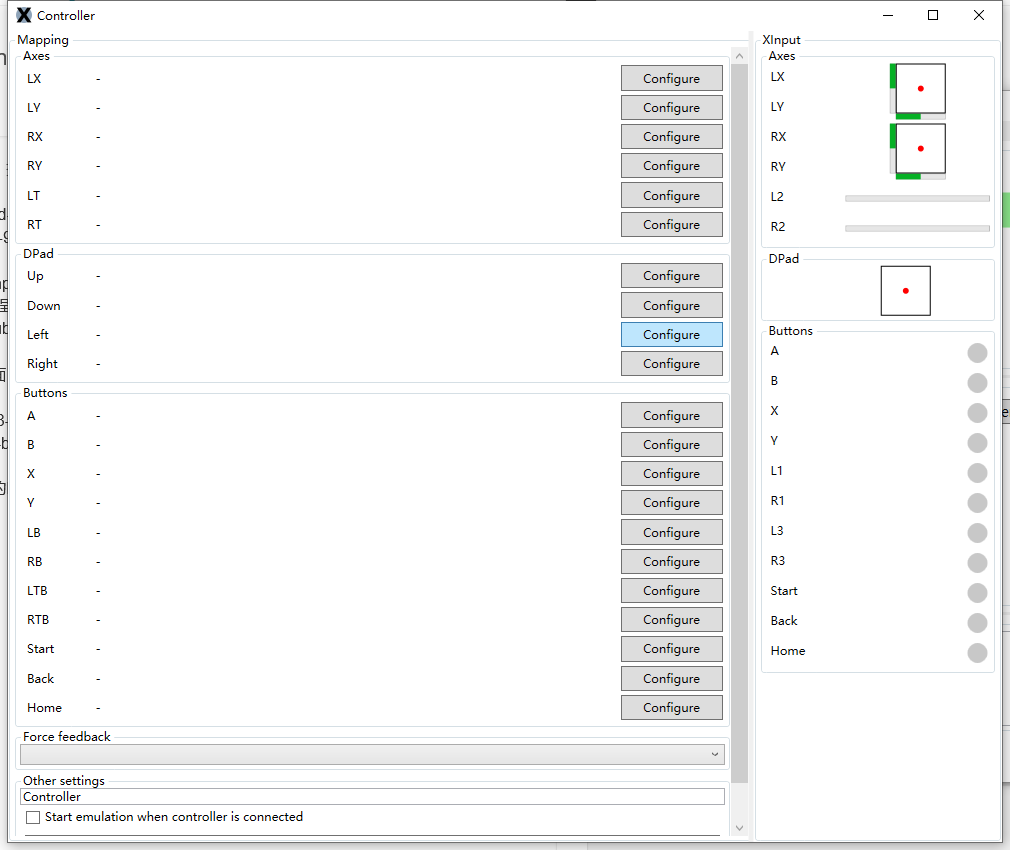
在这个设置界面里面依次设置对应的按钮映射。
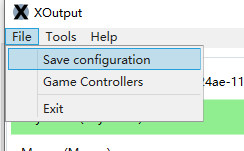
设置完成之后点击最上面菜单中的保存配置
然后设置开机自启动
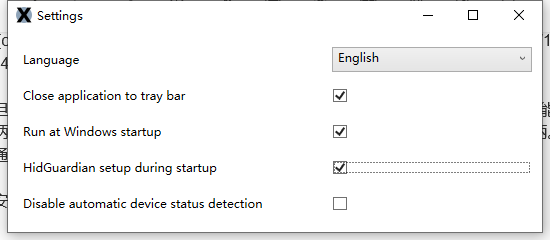
这样每次开机后就会自动映射手柄并添加一个xbox设备。
现在通过DirectInput或者xinput都可以正常读到设备的值了。
List<string> availableControllers = new List<string>(); var controllers = new[] { new SharpDX.XInput.Controller(UserIndex.One), new SharpDX.XInput.Controller(UserIndex.Two), new SharpDX.XInput.Controller(UserIndex.Three), new SharpDX.XInput.Controller(UserIndex.Four) }; foreach (var ctr in controllers) { if (ctr.IsConnected) availableControllers.Add("XBox controller " + ctr.UserIndex.ToString()); }上面是通过xinput获取手柄设备的例子
-
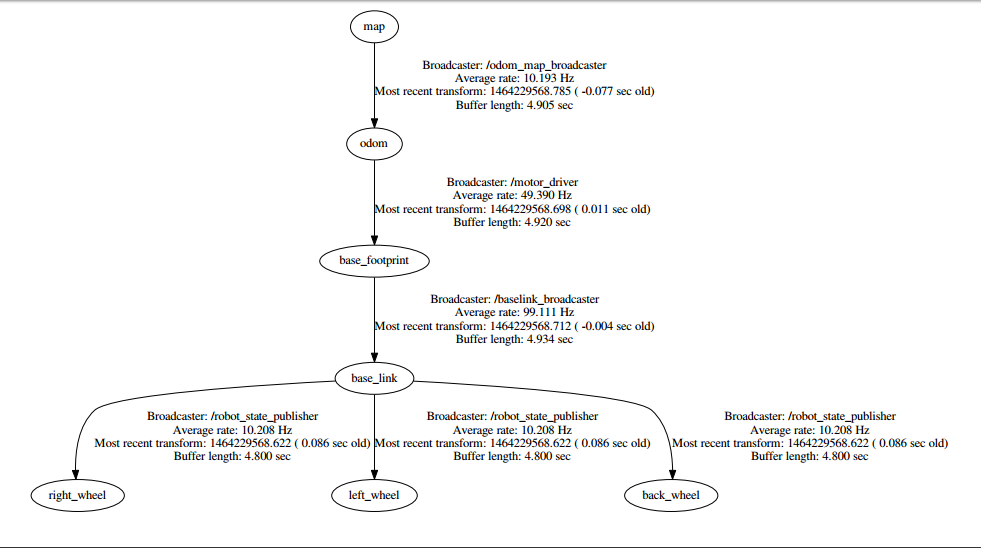
RE: 二维码自动充电无法保存dockposition问题发布在 产品服务
@yanyan1011-0 把baselink和basefootprint的之间的tf连接方法反过来。还有你的odom到baselink的tf是谁发布的,这个要改成odom到basefootprint
-
RE: 二维码自动充电无法保存dockposition问题发布在 产品服务
@yanyan1011-0
文档里面说订阅的是basefootprint的tf,不是baselink的,你还有加一个baselink到basefootprint的变换
-
RE: 怎样同时订阅多个话题,融合多种传感器的数据呢?发布在 激光雷达
@xzp 首先要获取到本车车速应该用的是Twist信息,或者里程计信息里面的Twist信息。cmd_vel只是速度控制指令,不是机器人实际的运动速度。这个信息是有header的。
用激光雷达测相对速度感觉也不是一个很好的方法,激光雷达的点比较稀疏,特征少。很难把目标车从点云中找出来。感觉用uwb,或者两个车都有全局的map坐标系比较靠谱。
-
ffplay 超低延迟播放网络视频流指令发布在 技术交流
ffplay -fflags nobuffer -flags low_delay -framedrop -fflags discardcorrupt -preset ultrafast -tune zerolatency -fpsprobesize 1 -max_delay 1 -probesize 32 -analyzeduration 0 -sync ext "http://192.168.0.104:8080/stream?topic=/multi/front/image_raw&type=h264"
-
Ubuntu 16.04 更新cmake发布在 技术交流
sudo apt-add-repository "deb https://apt.kitware.com/ubuntu/ $(lsb_release -cs) main" wget -O - https://apt.kitware.com/keys/kitware-archive-latest.asc 2>/dev/null | gpg --dearmor - | sudo tee /etc/apt/trusted.gpg.d/kitware.gpg >/dev/null sudo apt update sudo apt install cmake --upgrade -y