@叫我小冬枣 不太明白你的意思。要想让小强移动肯定要用小强的ros驱动程序的。卫星接收机是指gps吗?
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
weijiz 发布的帖子
-
RE: 使用xiaoqiang_track进行人体跟随和追踪发布在 技术交流
@Baymax 你的图像话题是
usb_cam/image_raw他订阅的话题是camera_node/image_raw你要在launch文件里面remap一下
-
RE: 蓝鲸ROS镜像发布发布在 产品服务
@qq303956 那个是对小强说的,udev规则绑定了端口号,只有设备插在对应的usb口上才会识别。和你的ssh没有关系。ssh可能和虚拟机网络设置有关系。
-
RE: 算法与串口读取直接有必要再加一个socket 通信吗发布在 ROS教程
@Lannister-Xiaolin 在 算法与串口读取直接有必要再加一个socket 通信吗 中说:
路径规划读取下位机数据进行规划使用有两种方案
如果系统是ROS的那一般用A。做成rostopic可以方便的集成ros的相关软件,也方便以后扩展。
-
Linux服务器共享打印机和扫描仪给Windows发布在 技术交流
现在服务器基本都是Linux的了,但是日常办公电脑很多还是Windows。下面介绍在这种情况下插在Linux服务器上的打印机和扫描仪如何共享给Windows用户。
首先要在服务器上开启samba服务
sudo apt install samba设置密码
sudo smbpasswd -a xxxx New SMB password: Retype new SMB password: Added user xxxx.其中xxxx是samba用户名
修改/etc/samba/smb.conf
[global] workgroup = WORKGROUP netbios name = BWOFFICE hosts allow = 192.168.0. security = user server role = standalone server map to guest = Bad User load printers = yes printcap name = cups disable spoolss = No cups options = raw use client driver = yes [teamshare] comment = team share folder browseable = yes path = /home/bwoffice/TeamShare create mask = 0775 directory mask = 0775 valid users = bwoffice force user = bwoffice force group = bwoffice public = yes writable = yes available = yes [printers] browseable = yes path = /var/spool/samba guest ok = yes writable = yes printable = yes printer name = m126a create mask = 0775 [print$] comment = Printer Drivers path = /var/lib/samba/printers browseable = yes read only = yes guest ok = yes按照上面的配置,注意修改成自己的用户和路径就可以共享文件夹和打印机了。
当然前提是安装好打印机驱动。对于打印机驱动,惠普打印机可以直接apt安装驱动。其他型号打印机只能搜一搜看看了。
sudo apt-get install hplip hplip-gui比较麻烦的是扫描仪驱动。我们的扫描仪是和打印机一体的。直接打开惠普的打印机驱动在扫描的时候会提示下载插件。插件安装完成后就可以开启扫描功能了。插件下载速度很慢,我们可以直接手动下载安装。下载地址 注意下载的版本一定要和系统安装的hplip版本一致,否则会安装失败。
扫描仪的共享通过 scanservjs 。这是一个web程序,在网页中点击扫描后直接调用主机上的扫描仪,然后扫描生成图片或者pdf。功能全面而且简单易用。
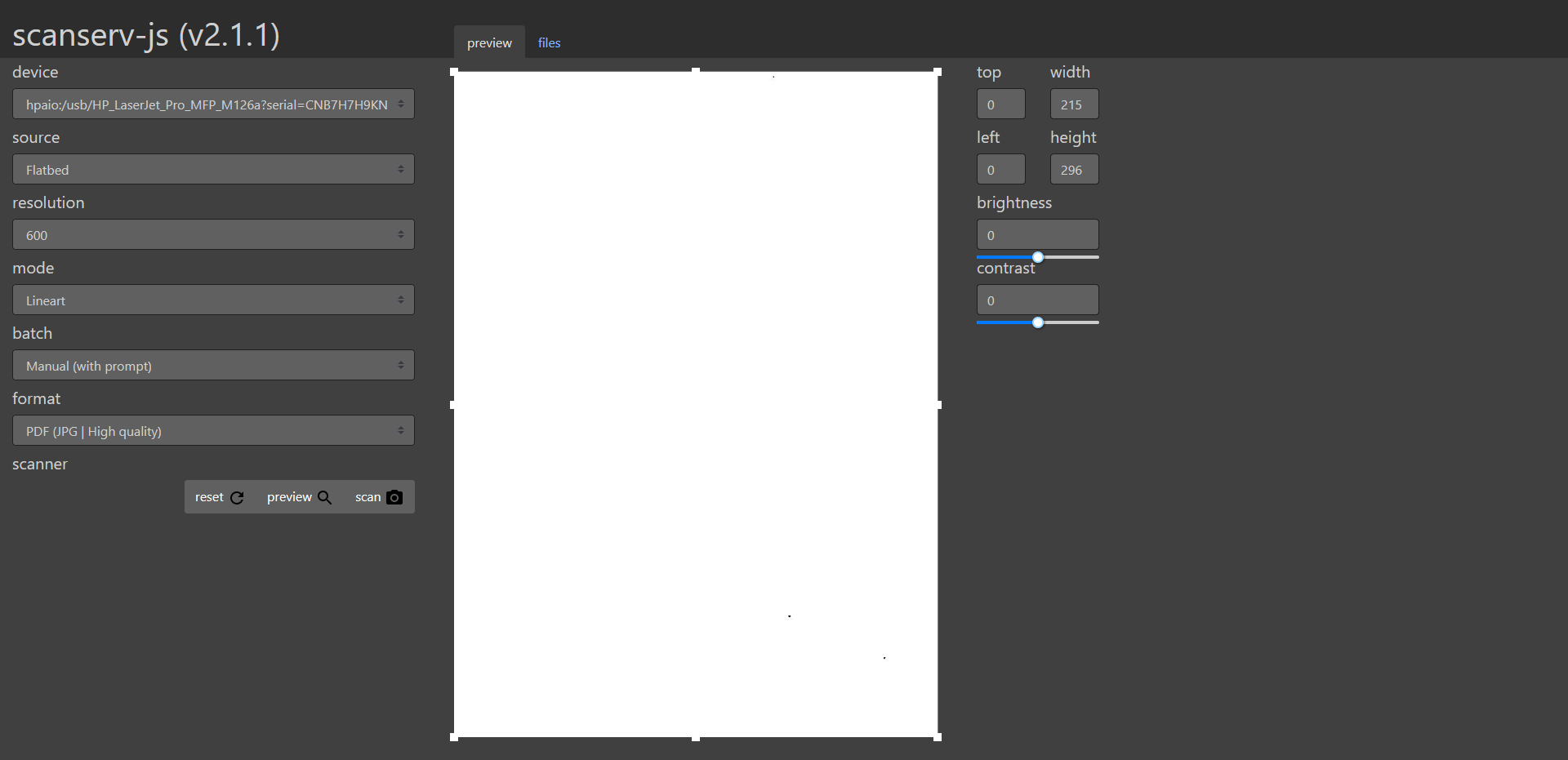
需要注意的是docker的安装方式会有权限问题,导致docker无法访问扫描仪硬件。手动安装的方式没有问题。
-
RE: 在Ubuntu 20.04上使用Systemback发布在 技术交流
@jamie-hu 在 在Ubuntu 20.04上使用Systemback 中说:
提示无法格式化或者写入这个分区
现在的nvme硬盘的支持是我直接从其他人维护的版本merge来的,由于我没有nvme硬盘所以没有测试。可能是存在问题的。
手动格式化安装后无法启动可能是由于没有安装grub,需要手动给/boot/efi单独分区,然后选择安装grub。
-
RE: 在Ubuntu 20.04上使用Systemback发布在 技术交流
@低调的炫耀 可以在16.04上用,更老的系统没有测试过。最新版本目前是1.8.8。16.04可以在apt安装的时候加上版本号否则可能安装的是原版。
-
如何在nuget上发布自己软件包发布在 技术交流
nuget是C#的包管理工具。我们自己写的常用的项目可以打包发布上去,这样以后添加依赖就很方便。首先需要设置项目的
nuspec文件,这个文件用来给软件包添加一些额外信息,展示在nuget上。假如我们的项目叫做UpdaterLib那么就添加UpdaterLib.nuspec文件。下面是文件内容的例子。<?xml version="1.0"?> <package > <metadata> <id>Randoms.Updater.UpdaterLib</id> <version>$version$</version> <title>$title$</title> <authors>Randoms</authors> <owners>Randoms</owners> <licenseUrl>https://opensource.org/licenses/MIT</licenseUrl> <projectUrl>https://github.com/BlueWhaleRobot/updater</projectUrl> <requireLicenseAcceptance>false</requireLicenseAcceptance> <description>A simple software update tool</description> <releaseNotes>Use commit message, instead of tags</releaseNotes> <copyright>Copyright 2018</copyright> <tags></tags> </metadata> </package>然后在项目的
AssembleInfo文件中设置文件属性using System.Reflection; using System.Runtime.CompilerServices; using System.Runtime.InteropServices; // 有关程序集的一般信息由以下 // 控制。更改这些特性值可修改 // 与程序集关联的信息。 [assembly: AssemblyTitle("updaterLib")] [assembly: AssemblyDescription("A simple software update tool")] [assembly: AssemblyConfiguration("")] [assembly: AssemblyCompany("Bluewhale Robot")] [assembly: AssemblyProduct("updaterLib")] [assembly: AssemblyCopyright("Copyright © 2018")] [assembly: AssemblyTrademark("bwbot")] [assembly: AssemblyCulture("")] // 将 ComVisible 设置为 false 会使此程序集中的类型 //对 COM 组件不可见。如果需要从 COM 访问此程序集中的类型 //请将此类型的 ComVisible 特性设置为 true。 [assembly: ComVisible(false)] // 如果此项目向 COM 公开,则下列 GUID 用于类型库的 ID [assembly: Guid("13b1749f-dbfb-49fb-a6ac-aca7b57ffe35")] // 程序集的版本信息由下列四个值组成: // // 主版本 // 次版本 // 生成号 // 修订号 // // 可以指定所有值,也可以使用以下所示的 "*" 预置版本号和修订号 //通过使用 "*",如下所示: // [assembly: AssemblyVersion("1.0.*")] [assembly: AssemblyVersion("1.0.0.13")] [assembly: AssemblyFileVersion("1.0.0.13")]创建完成之后,我们调用nuget pack生成nupkg软件包
nuget pack .\updaterLib\updaterLib.csproj后面的参数是你的项目文件路径
然后注册nuget开发账号,同时生成api key。
在本地设置api key
nuget setApiKey oy2igbrx3ql44eepafpjreabyiwqy发布软件包
nuget push YourPackage.nupkg -Source https://api.nuget.org/v3/index.json发布成功后就能在自己nuget管理界面看到软件包了。再等一段时间就会自动同步到visual studio的nuget服务器里面。以后添加依赖就可以像正常的nuget软件一样了。
-
RE: 小强ROS机器人教程(27)___bw_auto_dock自动充电功能包的使用和实现原理发布在 产品服务
@1762363551 你的串口设备号是不是不对,看看/dev/ttyUSB2是不是存在
-
RE: 蓝鲸ROS镜像发布发布在 产品服务
@gychen-n 可以手动启动startup 服务看看什么输出
sudo service startup stop roslaunch startup startup.launch
-
RE: 蓝鲸ROS镜像发布发布在 产品服务
@gychen-n 可能是电脑太卡界面没出来,可以提高虚拟的配置试试。提示音是机器人在做硬件自检,说明虚拟机的程序已经正常运行了。可以通过执行 sudo service startup stop 关闭