@aoxiang realsense2_camera要使用蓝鲸智能开源仓库里面的包
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
xiaoqiang 发布的帖子
-
RE: 小强ROS机器人障碍物识别演示视频发布在 产品服务
@TransLogic 参考这里的教程10相关的launch文件涉及到的包,https://community.bwbot.org/topic/110/小强机器人用户手册和教程目录

-
RE: XQ4pro机器车底板故障,怎么处理?具体描述如下发布在 产品服务
@miao 1.主机没有烧毁的话,把轮子和主机卸下来,联系淘宝客服寄回维修。
2.正常接kinect的电源也是不会烧毁底盘的,底盘接电池两根线接入电池后,用万用表量“接主机”这跟线的电压输出是不是12v
-
RE: 激光雷达建图的时候map出现没有接收数据的情况发布在 激光雷达
@叫我小冬枣 里程计部分没有发布,检查底盘驱动xqserial_server包是否正常启动,底盘串口有没有插好,底盘有没有上电
-
RE: BW-DR03 with ROS wrong direction control发布在 产品服务
@jarubank no, the motor is braked by short circuit in BW-DR03
-
BW-DR13驱动器资料包发布在 产品服务
BW-DR13驱动器资料包,点击下载
kinetic版本ros驱动包:https://gitee.com/BluewhaleRobot/xqserial_server/tree/foc_dev
noetic和moletic版本ros驱动包:https://gitee.com/BluewhaleRobot/xqserial_server/tree/foc_noetic
xqserial_server包配置手册参考这里,BW-DR13和BW-DR03代码分支不同但是ros驱动用法一致:https://community.bwbot.org/topic/2943/bw-dr03驱动器ros驱动包xqserial_server配置手册
-
RE: 小强ROS机器人教程(32)___realsense深度摄像头使用跟随包turtlebot_follower发布在 产品服务
@joy https://github.com/BluewhaleRobot/turtlebot_apps/blob/indigo/turtlebot_follower/launch/xiaoqiangfollower_realsense.launch
-
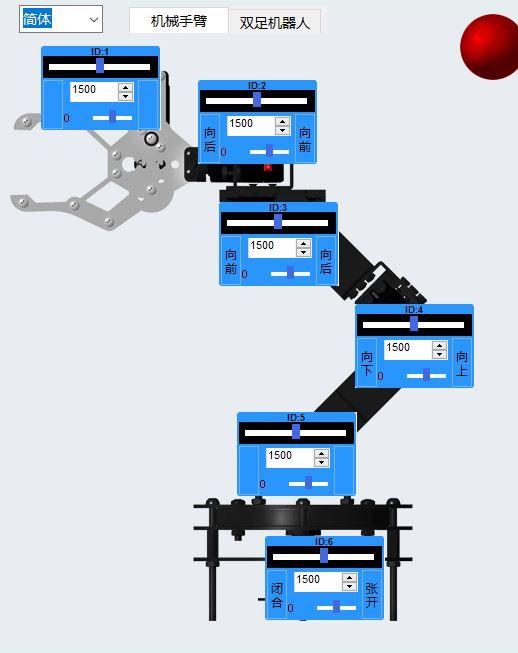
RE: 小强ROS机器人教程(22)_操作6自由度机械臂发布在 产品服务
@fly19955736 可以安装小强镜像试一下,镜像里面是配置好的,https://community.bwbot.org/topic/232/蓝鲸ros镜像发布/27