@jinmenglei 不要超过你购买的电压范围,会烧毁
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
xiaoqiang 发布的帖子
-
RE: 怎么使用vb.net通过串口与伽利略导航通讯发布在 技术交流
@周高玉 推荐用http api,串口功能少而且要配置
https://doc.bwbot.org/zh-cn/books-online/galileo-proto/http.html
-
RE: BW-DR03 with ROS wrong direction control发布在 产品服务
@jarubank the nan is a wrong data. I have updated the code, added a nan value filter . Use git pull, get the new code, then catkin_make .
https://github.com/BluewhaleRobot/xqserial_server/tree/lungu
-
RE: BW-DR03 with ROS wrong direction control发布在 产品服务
@jarubank maxspeed = 2 * 1.224/0.5 = 4.896, so maybe 5 is the true value of maxspeed.
-
RE: BW-DR03 with ROS wrong direction control发布在 产品服务
@jarubank edit xqserial.launch file, change those two parameters “wheel_radius” and “max_speed” to the true value of your car.
-
RE: BW-DR03驱动器问题发布在 产品服务
@hxk426 https://community.bwbot.org/topic/2943/bw-dr03驱动器ros驱动包xqserial_server配置手册
-
RE: BW-DR03 with ROS wrong direction control发布在 产品服务
@jarubank
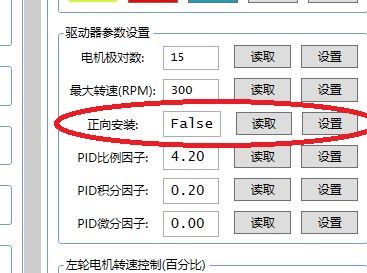 Set this value to true. It means installation direction of bw_dr03. upwoard is true, downward is false.
Set this value to true. It means installation direction of bw_dr03. upwoard is true, downward is false.
-
RE: 求助,怎么用速腾聚创的16线雷达进行cartographer建图发布在 技术交流
@Duke-Allen https://community.bwbot.org/topic/524/谷歌cartographer直接使用速腾聚创3d激光雷达三维数据进行2d建图
-
RE: 小强ROS机器人教程(27)___bw_auto_dock自动充电功能包的使用和实现原理发布在 产品服务
@HarryLee 这些信息对解决问题没有什么帮助,调试程序,看程序卡在步骤5里面的哪个流程了,代码可以自己增加ros_error之类的输出语句,打印卡住部分的程序信息就能很快确定出问题