@ranzhu-uestcer rviz里面可以把点云显示大小调大一些,这样视觉效果上会更有稠密感
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
Posts made by xiaoqiang
-
RE: loam_velodyne使用速腾聚创16线激光雷达建图和计算激光雷达里程计posted in 激光雷达

-
RE: 小强ROS机器人教程(27)___bw_auto_dock自动充电功能包的使用和实现原理posted in 产品服务
@huapiaoxiang21 1.电量和电压成正比,电压数据发布在话题/bw_auto_dock/Batterypower 2.参考包源代码https://github.com/BluewhaleRobot/bw_auto_dock/blob/version2/src/getDockPosition.cpp#L122
-
RE: 小强ROS机器人教程(27)___bw_auto_dock自动充电功能包的使用和实现原理posted in 产品服务
@lovelyyoshino 不要设成ttyUSB0,这个端口号很容易被其它程序比如底盘驱动占用,导致冲突
-
小强ROS机器人教程(32)___realsense深度摄像头使用跟随包turtlebot_followerposted in 产品服务
教程和kinect跟随包turtlebot_follower一样,区别在于步骤二启动的launch文件不一样
roslaunch turtlebot_follower xiaoqiangfollower.launch #kinect设备使用这个launch roslaunch turtlebot_follower xiaoqiangfollower_realsense.launch #realsense设备则使用这个launch
-
RE: google激光雷达slam算法Cartographer的安装及bag包demo测试posted in 产品服务
@名流丶乐乐 https://github.com/BlueWhaleRobot/cartographer.git
https://github.com/BlueWhaleRobot/cartographer_ros.git
-
RE: 小强ROS机器人教程(10)___使用kinect进行自主移动避障posted in 产品服务
@weijiafeng 第四代之后的RealSense模块,在室内无阳光下使用没有遇到这些情况,比较稳定
-
RE: 小强ROS机器人教程(10)___使用kinect进行自主移动避障posted in 产品服务
@柠檬蔚 需要安装蓝鲸版本才有: http://git.bwbot.org/publish/iai_kinect2.git
-
RE: google激光雷达slam算法Cartographer的安装及bag包demo测试posted in 产品服务
@名流丶乐乐 贴完整错误内容,软件源要和教程一样用的是蓝鲸github仓库的
-
RE: 小强ROS机器人教程(22)_操作6自由度机械臂posted in 产品服务
@kadian 是用的串口连接控制LSC吗?这里可能和rosserial端口冲突了,调整配置一下串口端口号。还有建议不用arduino,把目前arduino的功能封装成一个ros包里面,然后直接运行在ros master主机上。
-
RE: 使用pointcloud_to_laserscan包将速腾聚创3d激光雷达转换成高质量2d激光雷达posted in 激光雷达
@雾琴水音 参考这里https://github.com/BluewhaleRobot/pointcloud_to_laserscan/blob/lunar-devel/launch/xiaoqiang_lungu_kinect.launch
-
RE: 使用pointcloud_to_laserscan包将速腾聚创3d激光雷达转换成高质量2d激光雷达posted in 激光雷达
@gejiaqi1117 参考这里https://community.bwbot.org/topic/765/使用depthimage_to_laserscan包将kinect深度图像转换成2d激光雷达话题
-
使用depthimage_to_laserscan包将kinect深度图像转换成2d激光雷达话题posted in 激光雷达
kinect 1代的驱动包freenct_stack可以输出深度图像和点云,理论上可以使用pointcloud_to_laserscan包将点云转换成scan数据,但是freenct_stack包输出的点云数据所在的坐标系不是常用的base_link坐标系,要先进行坐标变换才能转换,这导致pointcloud_to_laserscan包效率很低。
#运行下列命令可以测试pointcloud_to_laserscan包的转换功能,用“rostopic hz /kinect/scan”查看输出的/kinect/scan话题发布频率,可以发现值很低,即转换效率太低不实用 roslaunch pointclound_to_laserscan xiaoqiang_lungu_kinect.launch下文将介绍使用depthimage_to_laserscan包将kinect深度图像转换成2d激光雷达话题的详细步骤,这种方法输出的雷达话题/kinect/scan,频率高达20HZ,满足实时性要求。
1.安装depthimage_to_laserscan包
#需要安装到ros工作空间,以小强主机为例 cd ~/Documents/ros/src git clone https://github.com/BluewhaleRobot/depthimage_to_laserscan.git cd .. catkin_make2.启动转换节点开始测试
freenct_stack驱动发布的深度图像/kinect/depth/image被 depthimage_to_laserscan节点订阅后将其转换成laserscan话题/kinect/scan,所在的frame_id则是“kinect_link”
#新开一个终端 #如果是小强xq5轮毂电机版本,请启动这个launch文件 roslaunch depthimage_to_laserscan xiaoqiang_lungu_kinect.launch #如果是小强xq4-pro普通电机版本,请启动这个launch文件 roslaunch depthimage_to_laserscan xiaoqiang_pro_kinect.launch #新开一个终端将kinect角度设为水平方向 rostopic pub /set_tilt_degree std_msgs/Int16 '{data: 0}' -1正常的话,现在就可以获取10hz的laserscan类型话题数据了
#新开一个终端,查看转换后的/kinect/scan话题发布频率 rostopic hz /kinect/scan4.在rviz中查看2d雷达数据
roscd depthimage_to_laserscan/launch/ rviz -d kinect.rviz #图中白线就是转换输出的2d雷达数据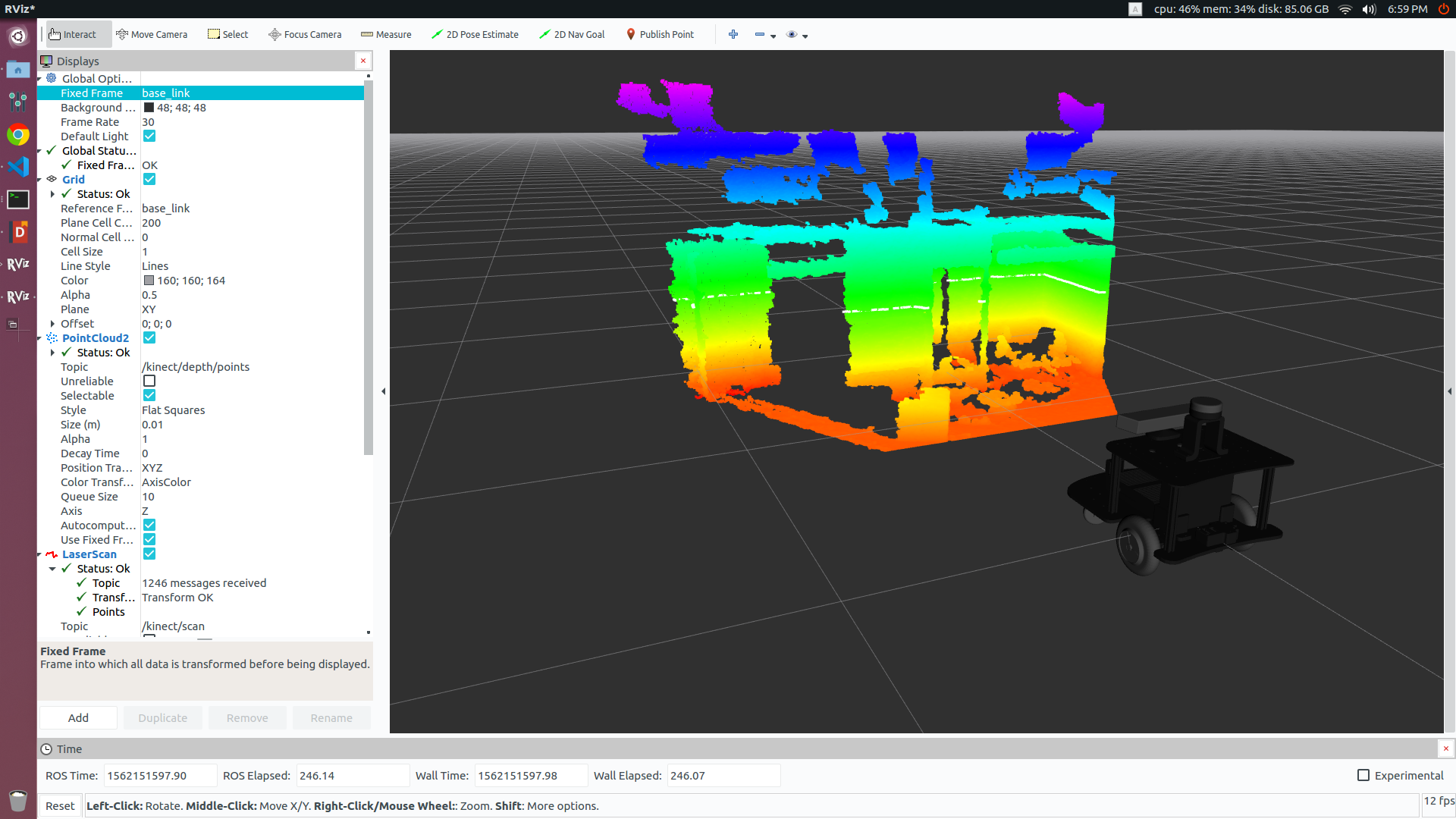
-
使用pointcloud_to_laserscan包将北科天绘3d激光雷达转换成高质量2d激光雷达posted in 激光雷达
北科天绘16线激光雷达R-Fans-16的ros驱动安装与rviz点云显示,这篇教程安装的ROS驱动已经把R-Fans-16雷达变成了和速腾聚创3D雷达一样的设备,因此雷达数据处理教程、建图教程都可以完全通用,只用把雷达驱动launch文件启动命令替换成启动R-Fans-16的命令即可。
#把速腾聚创雷达的驱动启动命令换成北科天绘的即可 roslaunch rslidar_pointcloud xiaoqiang_lungu.launch #这是速腾聚创的启动命令 roslaunch rfans_driver xiaoqiang_lungu.launch #这是北科天绘的启动命令因此,根据使用pointcloud_to_laserscan包将速腾聚创3d激光雷达转换成高质量2d激光雷达,我们只需要启动北科天绘的雷达驱动,然后再执行速腾聚创的转换节点即可
#新开一个终端,启动3d雷达驱动 roslaunch rfans_driver xiaoqiang_lungu.launch #新开一个终端,启动pointcloud_to_laserscan节点 roslaunch pointcloud_to_laserscan xiaoqiang_rslidar.launch正常的话,现在就可以获取10hz的laserscan类型话题数据了,数据发布在/rslidar/scan话题上
在RVIZ里面也一样的查看数据
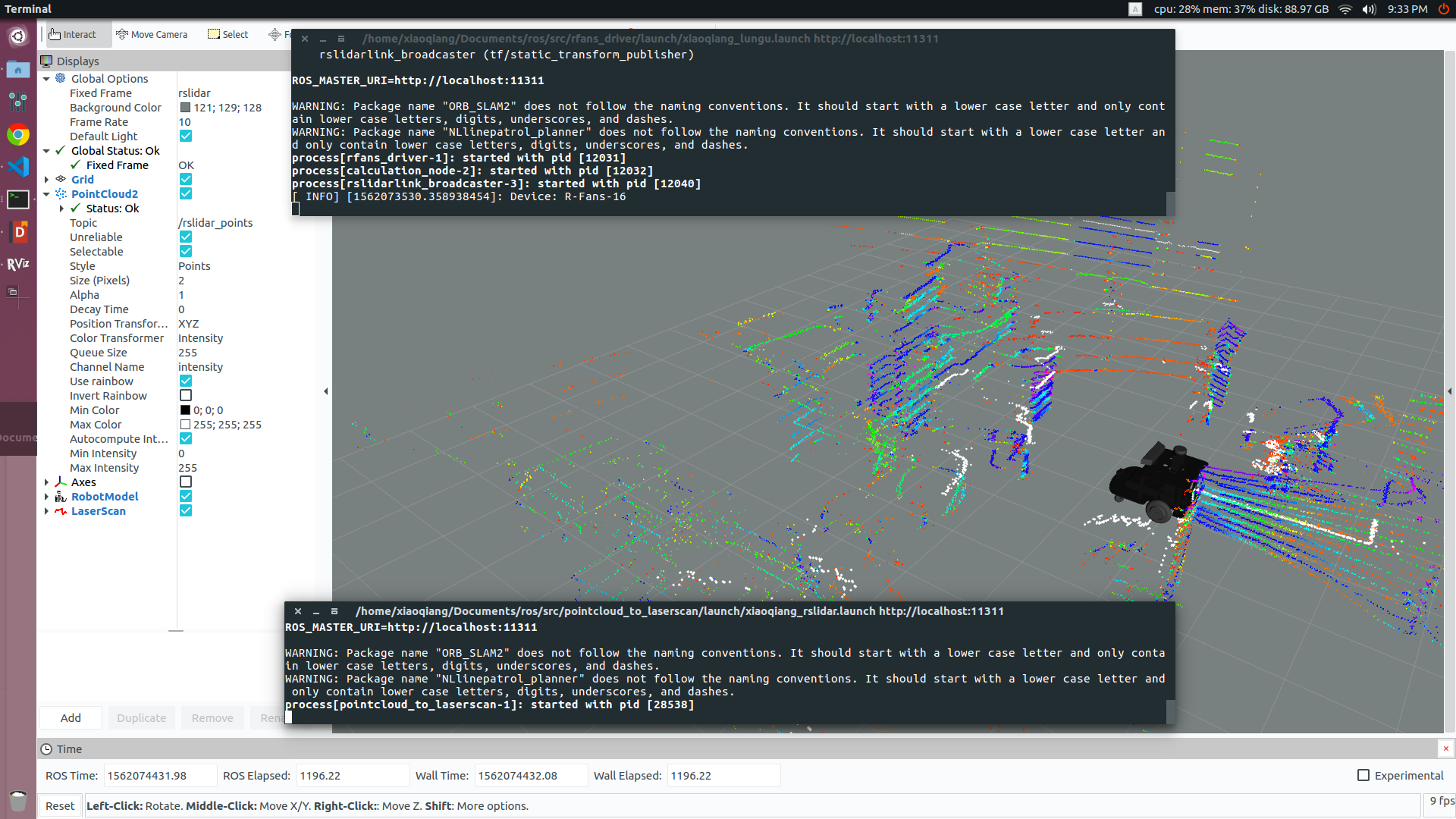
上图白线就是对应转换完成的scan数据
-
北科天绘16线激光雷达R-Fans-16的ros驱动安装与rviz点云显示posted in 激光雷达
北科天绘16线激光雷达R-Fans-16的供电是直流12v 3A,通信接口是rs485网络接口。小强ros开发平台用户可以用底盘dc电源头供电,主机的网口也可以直接连接雷达。下面介绍它的ros驱动安装和测试教程,如果是和小强平台一起购买的雷达,小强主机出厂时已经配置好驱动,请直接运行步骤4测试部分。
1.在windows平台设置雷达网络接口参数
R-Fans-16雷达的网络接口是静态ip分配方式,且需要用官方配置软件编辑它的固件才能设置网络参数。
使用北科天绘官网提供的R-Fans-CtrlView-v2.11.3软件,根据《R-Fans用户手册V4.3.10(V6K).pdf》手册设置雷达的ip地址。
雷达出厂默认设置是192.168.0.3,小强用户设备已经被修改为169.254.119.200,因此要先配置到新IP地址
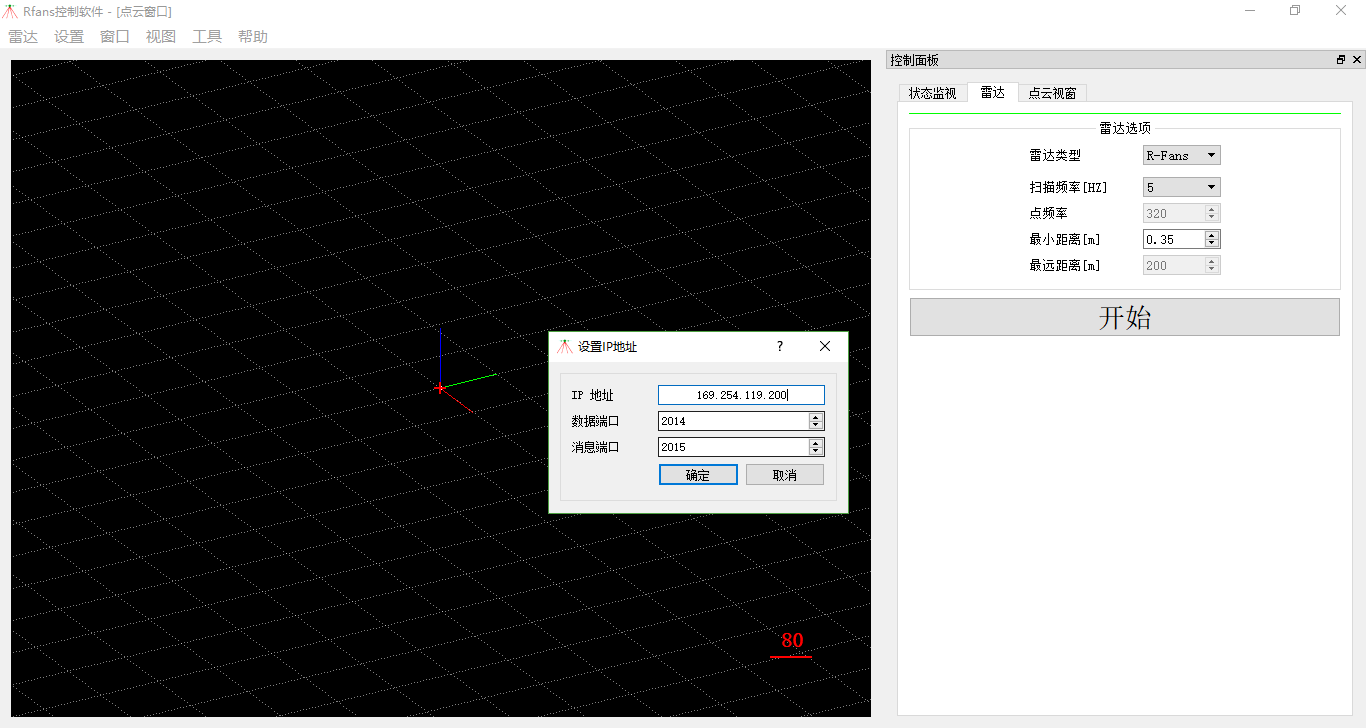
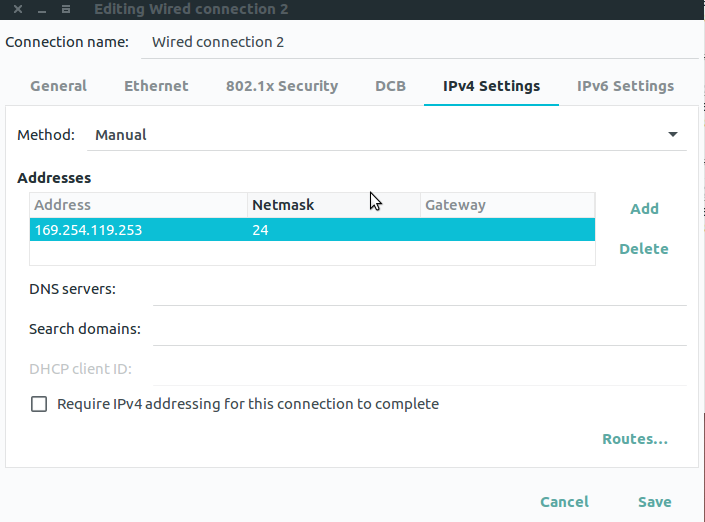
雷达IP设置成功后,把笔记本有线网卡IP地址设为169.254.119.253,然后连上雷达网线。就可以预览雷达数据了
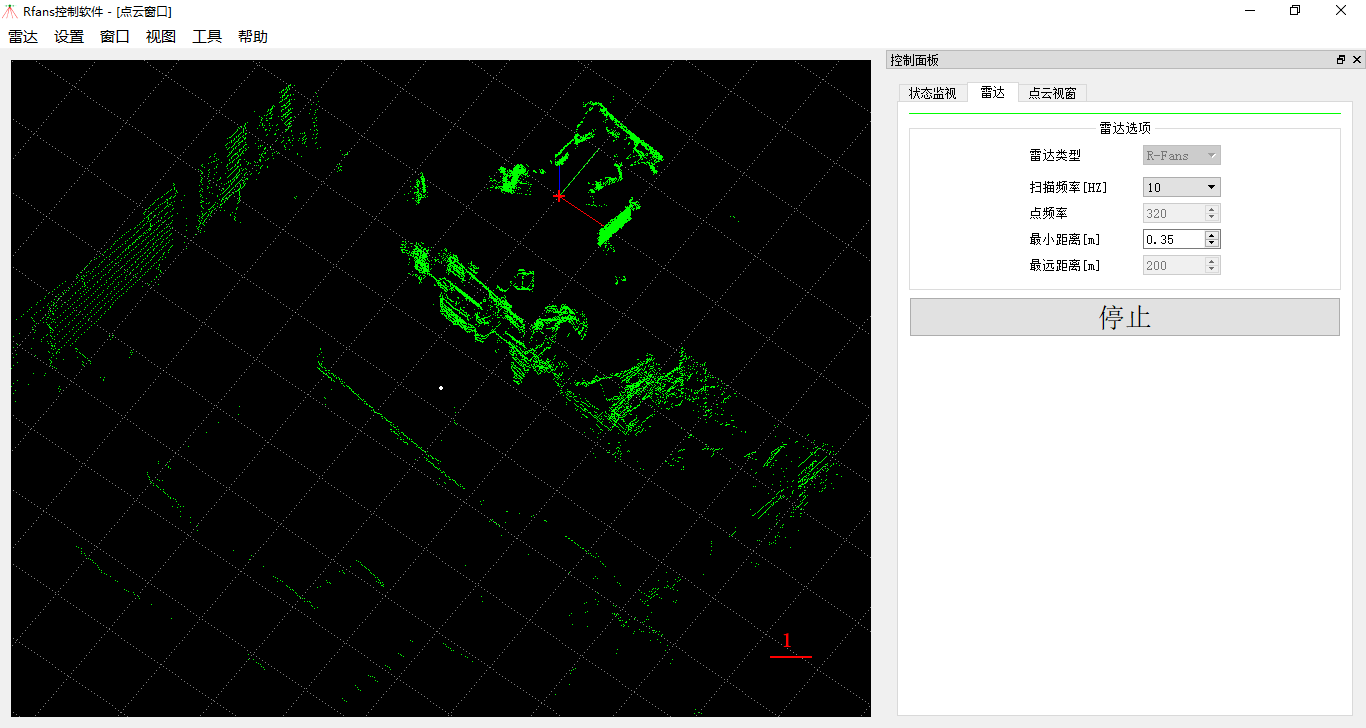
现在可以配置雷达的新IP地址了,因为主机往往还需要连接其他网络,因此最好按照下图设置成169.254.x.x网段,这个网段ubuntu默认为本地网络,不会干扰其它网络的运行。
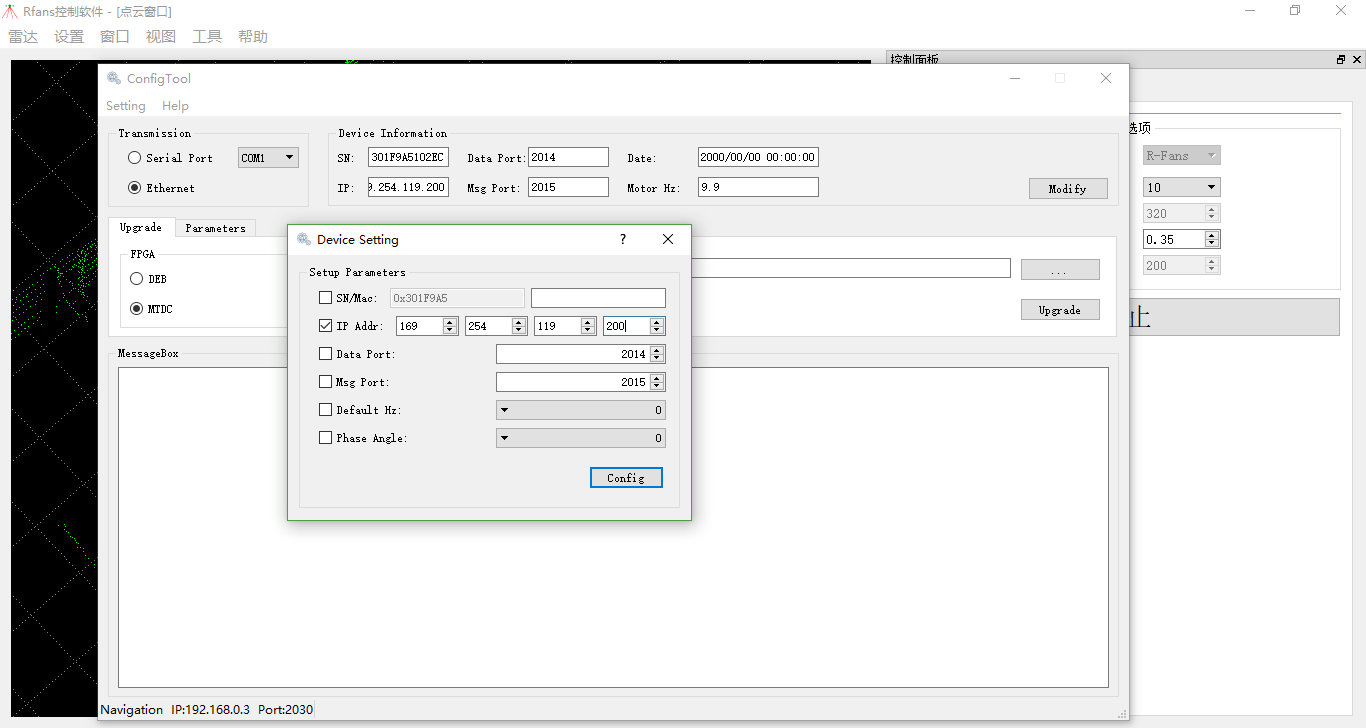
它的ros驱动也需要指定ip地址参数,为了后续教程的方便,请将ip地址按照上图的地址设成一模一样的。
2.根据步骤1中的ip地址设置ros主机的有线网络
3.安装ros驱包ros_rslidar
#ros_rslidar需要安装到ros工作空间,以小强主机为例 cd ~/Documents/ros/src git clone https://github.com/BluewhaleRobot/rfans_driver.git cd .. catkin_make4.将雷达接入电源,同时用网线连接ros主机,启动ros驱动launch文件
#下面aunch文件里面的ip地址可以根据实际设置,进行修改 #如果是小强xq5轮毂电机版本,请启动这个launch文件 roslaunch rfans_driver xiaoqiang_lungu.launch #启动成功后,驱动节点默认会发布10hz的点云话题//rslidar_points,这个话题的frame_id是rslidar,上面的launch文件也发布了base_link到rslidar的tf关系,请根据实际安装参数进行调整。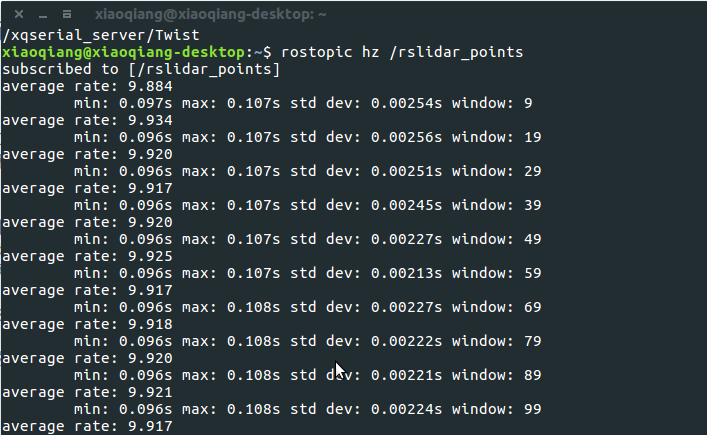
6.在rviz中显示发布的点云数据
roscd rfans_driver/launch/ rviz -d xiaoqiang.rviz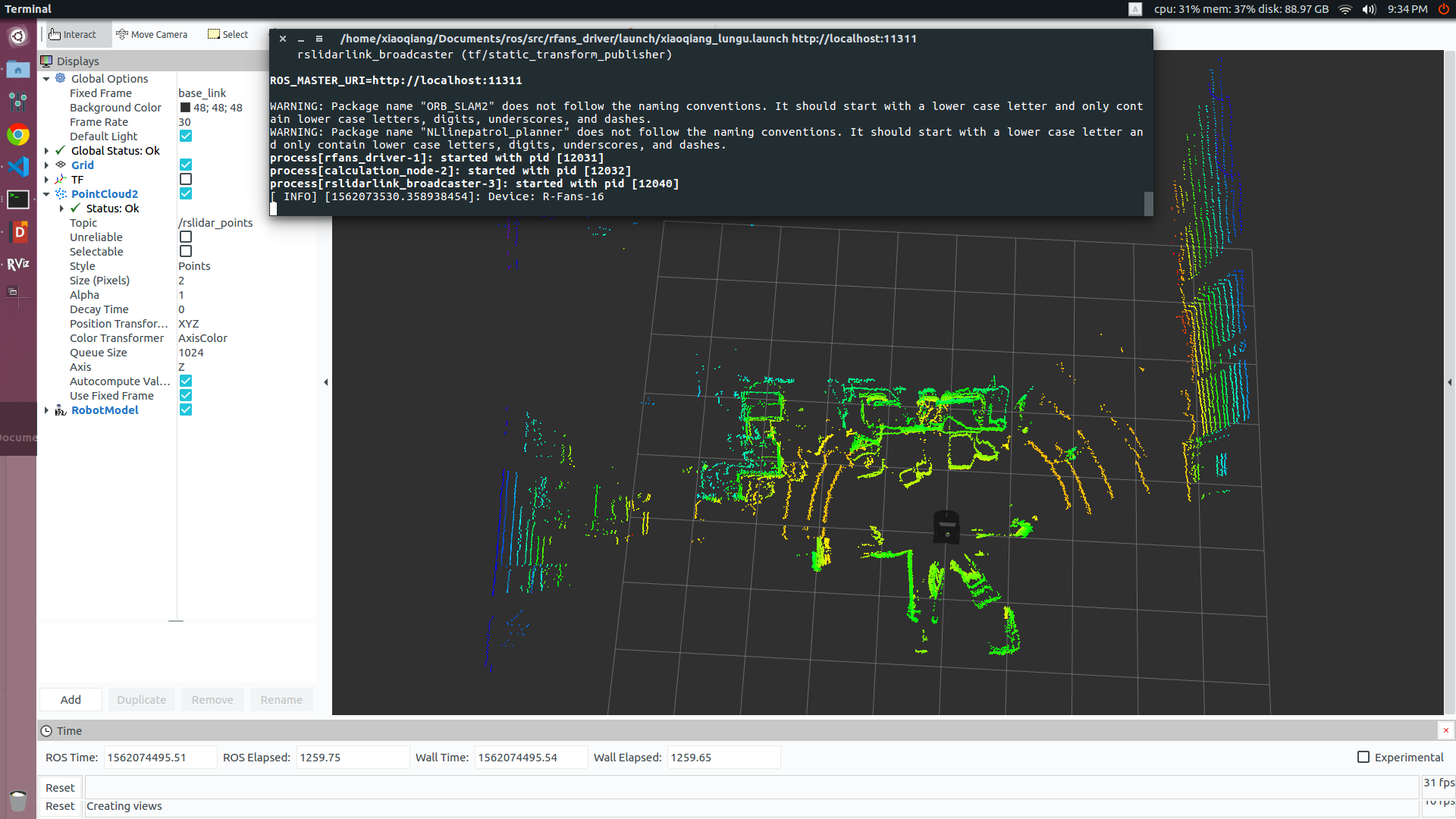
-
RE: turtlebot将采集到的雷达数据和里程计数据,保存为栅格地图posted in 激光雷达
@zhjd1996 这篇文章可以参考一下, https://zhuanlan.zhihu.com/p/21738718
-
RE: 使用pointcloud_to_laserscan包将速腾聚创3d激光雷达转换成高质量2d激光雷达posted in 激光雷达
@gejiaqi1117 这种教程网上已经很多了,后续我们会在小强的freenect_stack包里面增加一个演示launch文件
-
RE: 谷歌cartographer使用速腾聚创3d激光雷达转二维数据进行2d建图posted in 激光雷达
@zhaoyu24 雷达数据所在frame到tracking frame之间的tf必须提供