@HarryLee 只用提供launch和readme文件里面要求的值,用rqt_graph可以分析节点数据流,乱跑说明里程计有问题或者充电桩位置保存的有问题
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
Posts made by xiaoqiang
-
RE: 小强ROS机器人教程(27)___bw_auto_dock自动充电功能包的使用和实现原理posted in 产品服务

-
RE: Ubuntu下电机驱动器无法调速posted in 讨论区
@chen_xk 这种问题只有你们自己才能解决了,肯定和你电机和接线有关。https://community.bwbot.org/topic/2943/bw-dr03驱动器ros驱动包xqserial_server配置手册
-
BW-DR03驱动器ROS驱动包xqserial_server配置手册posted in 产品服务
ROS驱动包代码:https://git.bwbot.org/publish/xqserial_server/-/tree/lungu #代码分支是lungu
BW-DR03驱动器xqserial_server包配置手册.pdf
-
RE: Ubuntu下电机驱动器无法调速posted in 讨论区
@chen_xk 安装ros驱动包https://github.com/BluewhaleRobot/xqserial_server,然后通过cmd_vel话题控制车速
-
RE: GPS在ROS中的测试和使用posted in ROS教程
如果运行gpsd时出现, 这种错误 can’t bind to IPV4 port gpsd,Address already in use。可能是因为后台在执行gpsd这个服务,把它关闭掉再尝试运行。
sudo service gpsd stop gpsd -D 5 -n -N -b /dev/bwgps
-
镭神LS01B激光雷达ros驱动安装与测试posted in 产品服务
1.安装ros驱包LS01B,出厂带雷达的小强用户可以不用重复安装。
#LS01B需要安装到ros工作空间,以小强主机为例 cd ~/Documents/ros/src https://github.com/BluewhaleRobot/LS01B.git cd .. catkin_make -DCATKIN_WHITELIST_PACKAGES=ls01b_v22.将雷达usb数据线插入主机usb口,启动ros驱动launch文件
roslaunch ls01b_v2 xiaoqiang.launch #启动成功后,驱动节点默认会发布10hz的点云话题/scan,这个话题的frame_id是laser,上面的launch文件也发布了base_link到laser的tf关系,请根据实际安装参数进行调整。
3.在rviz中显示发布的点云数据
roscd ls01b_v2/launch rviz -d show.rviz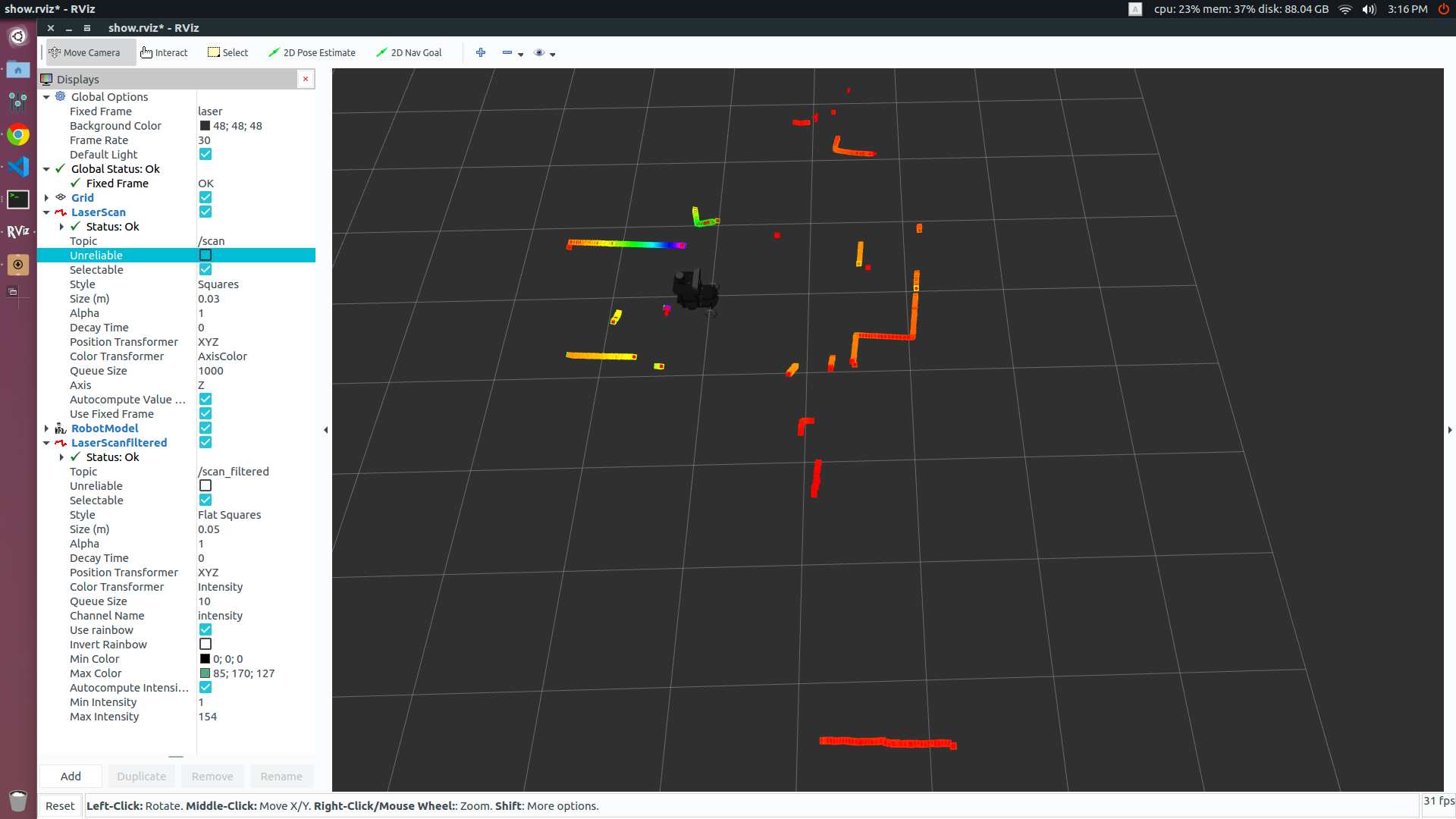
在rviz里面可以对比原始数据/scan和过滤处理后的数据/scan_filtered的区别。4.gmapping建图教程
https://doc.bwbot.org/en/books-online/xq-manual/topic/164.html
5.amcl导航教程
https://doc.bwbot.org/en/books-online/xq-manual/topic/166.html
-
RE: 小强ROS机器人教程(27)___bw_auto_dock自动充电功能包的使用和实现原理posted in 产品服务
@Slim 接通开关是充电包控制的,必须下发充电指令对接后才闭合,手动怼上内部开关不会接通。
-
IO扩展板使用资料posted in 产品服务
ROS驱动bw_io包配置手册.pdf
IO扩展板硬件手册.pdf
ROS驱动包源代码:https://github.com/BluewhaleRobot/bw_io.git
-
RE: 如何获取机器人在地图中的实时坐标?posted in 技术交流
@terminal 可以通过订阅tf关系获取,通常机器人本体坐标系是base_link, 地图坐标系是map。如果使用的是伽利略视觉导航系统,可以通过sdk获取,参考https://doc.bwbot.org/zh-cn/books-online/galileo-proto/ros.html#start。如果使用的是amcl定位包,它发布的amcl_pose话题就是机器人在地图上的实时坐标。
-
RE: 小强ROS机器人教程(8)___kinect1代 ROS驱动测试与安装posted in 产品服务
@terminal 先打印一下增加之前的tf树,然后再根据当前情况补。一个frame只能有一个parent,可以有多个child
-
RE: 原装和国产ps3手柄ros驱动程序posted in 产品服务
@Taiping 在 原装和国产ps3手柄ros驱动程序 中说:
Bluetooth: hci0: command 0x0c1a tx timeout
有16.04的机器吗,试试16.04。同时lsusb看一下蓝牙设备
-
RE: 使用rosbag录制和回放3d激光雷达数据和小强ROS开发平台的里程计IMU数据posted in 激光雷达
@Qiuxiaochang 教程里面说的“kinect供电”可以解决你的电源疑惑,先买一个路由器用一下就什么都明白了,不用想太多
-
RE: 使用rosbag录制和回放3d激光雷达数据和小强ROS开发平台的里程计IMU数据posted in 激光雷达
@Qiuxiaochang https://doc.bwbot.org/en/books-online/xq-manual/topic/126.html