@kardel_young 可以用12v直流电给kinect连接器供电
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
xiaoqiang 发布的帖子
-
RE: 业内主流的机器人操作系统发布在 行业动态
@gllf0814 其实问题应该改成ros和ubuntu是什么关系, ros不是计算机操作系统,而是指一套机器人通用的软件开发组件和框架,或者不准确的说你可以把ros看成是一个机器人通信库、算法库。在安卓、ubuntu、windows里面都可以使用ros。

-
RE: 小强ROS机器人教程(27)___bw_auto_dock自动充电功能包的使用和实现原理发布在 产品服务
@whq 代码branch分支要对,不能是master分支。ros驱动包要确保正常运行了,即launch运行窗口没有错误提示
-
RE: 求助如何将turtlebot_follower改为获取Kinect2代的图像进行跟随发布在 讨论区
@httttt kinect2和d435类似,可以参考这里提到的d435launch文件,https://community.bwbot.org/topic/776/小强ros机器人教程-32-___realsense深度摄像头使用跟随包turtlebot_follower
-
思特威推出CMOS图像传感器LED闪烁抑制技术,助力无人驾驶和车载应用发布在 行业动态
思特威CMOS图像传感器能够通过该技术提供的有效抑制能力,解决LED闪烁问题带来的车用安全隐患,进一步提升人工智能辅助驾驶系统及自动驾驶应用的安全性。
据麦姆斯咨询报道,技术领先的CMOS图像传感器供应商思特威科技(SmartSens)近日宣布推出自主研发的LED闪烁抑制技术。凭借思特威研发团队在LED闪烁抑制技术的创新实现方式,CMOS图像传感器能够通过该技术提供的有效抑制能力,解决LED闪烁问题带来的车用安全隐患,进一步提升人工智能辅助驾驶系统及自动驾驶应用的安全性。随着LED技术的发展以及LED产业的成熟,在交通信号灯、汽车照明与指示灯等应用场景中,LED凭借其发光效率高、稳定性好、使用寿命长的优势,已经逐渐取代传统发光源。然而,由于LED的驱动通常采用脉冲调制(PWM)方式,因此LED灯往往是以肉眼无法识别的频率(通常为90Hz)进行着闪烁。
虽然LED闪烁无法通过肉眼识别,但对于快门时间更短的CMOS图像传感器而言,这种闪烁往往是引起AI系统误判的根源。一旦LED驱动频率与传感器曝光频率不一致,就会出现曝光时间与LED开启时间错位的情况,从而采集到明暗错误或持续闪烁的图像信息。对于自动驾驶车用设计而言,这会引发无法接受的系统安全性问题。
特别是在国内外自动驾驶开发纷纷向L4、L5级别迈进时,汽车愈发依靠更多的CMOS图像传感器提供的准确图像数据,判断路况、信号标识、紧急状况等,从而利用人工智能算法进行驾驶操作相关的决策。这意味着,车用CMOS图像传感器必须能够适应当前以LED信号灯为主的道路信号体系。
为了准确分辨LED信号灯的开和关,需要CMOS图像传感器延长曝光时间以覆盖整个LED闪烁周期,但过长的曝光时间却容易引起过曝的问题,因此数家国外CMOS图像传感器厂商于几年前开始推出各自不同思路的解决方案来应对这一问题。而思特威目前则另辟蹊径,创新性地采用原创的QCell
 技术实现有效的LED闪烁抑制功能。
技术实现有效的LED闪烁抑制功能。除了解决LED闪烁问题,QCell
技术还可以提高感光度,从而提升夜晚的成像效果。并且,这一技术还能够提升CMOS图像传感器的动态范围,以在车库、隧道口等明暗变化巨大的场景中有效识别各种LED交通信号灯。
思特威首席市场官Chris Yiu女士表示:“LED闪烁抑制是车用CMOS图像传感器必须具备、却较难实现的功能。此次思特威通过自主研发,在国产CMOS图像传感器上实现了这一功能,相信将是中国汽车电子产业发展中一次不小的成功。未来,思特威针对汽车电子市场所推出的CMOS图像传感器芯片产品将搭载这一技术,帮助客户厂商提升汽车电子系统的适应性。”
目前,这一全新的LED闪烁抑制技术已经获得了诸多汽车应用开发合作伙伴的关注。江苏博沃汽车电子系统有限公司总经理张远鹏先生表示:“作为一家专注于汽车零部件及车用系统的供应商,博沃一直以来关注着车用CMOS图像传感器的发展。我们非常期待思特威搭载了这一全新LED闪烁抑制技术的车用CMOS图像传感器芯片产品,相信这些产品能帮助我们实现更安全、更智能的车载应用,特别是让自动驾驶汽车设计更上一个台阶。”
-
谷歌cartographer使用速腾聚创3d激光雷达数据进行建图(在线3d模式)与纯定位发布在 激光雷达
1. 保证底盘驱动和激光雷达驱动已经正常运行。
rostopic hz /xqserial_server/Odom #有50hz数据就表示底盘驱动正常 rostopic hz /rslidar_points #有10hz数据表示激光雷达驱动正常2. 启动cartographer在线建图节点
roslaunch cartographer_ros xiaoqiang_3d_online.launch在rviz中打开/home/xiaoqiang/Documents/ros/src/cartographer_ros/cartographer_ros/configuration_files/rslidar_3d_online.rviz配置文件
可以看到下图
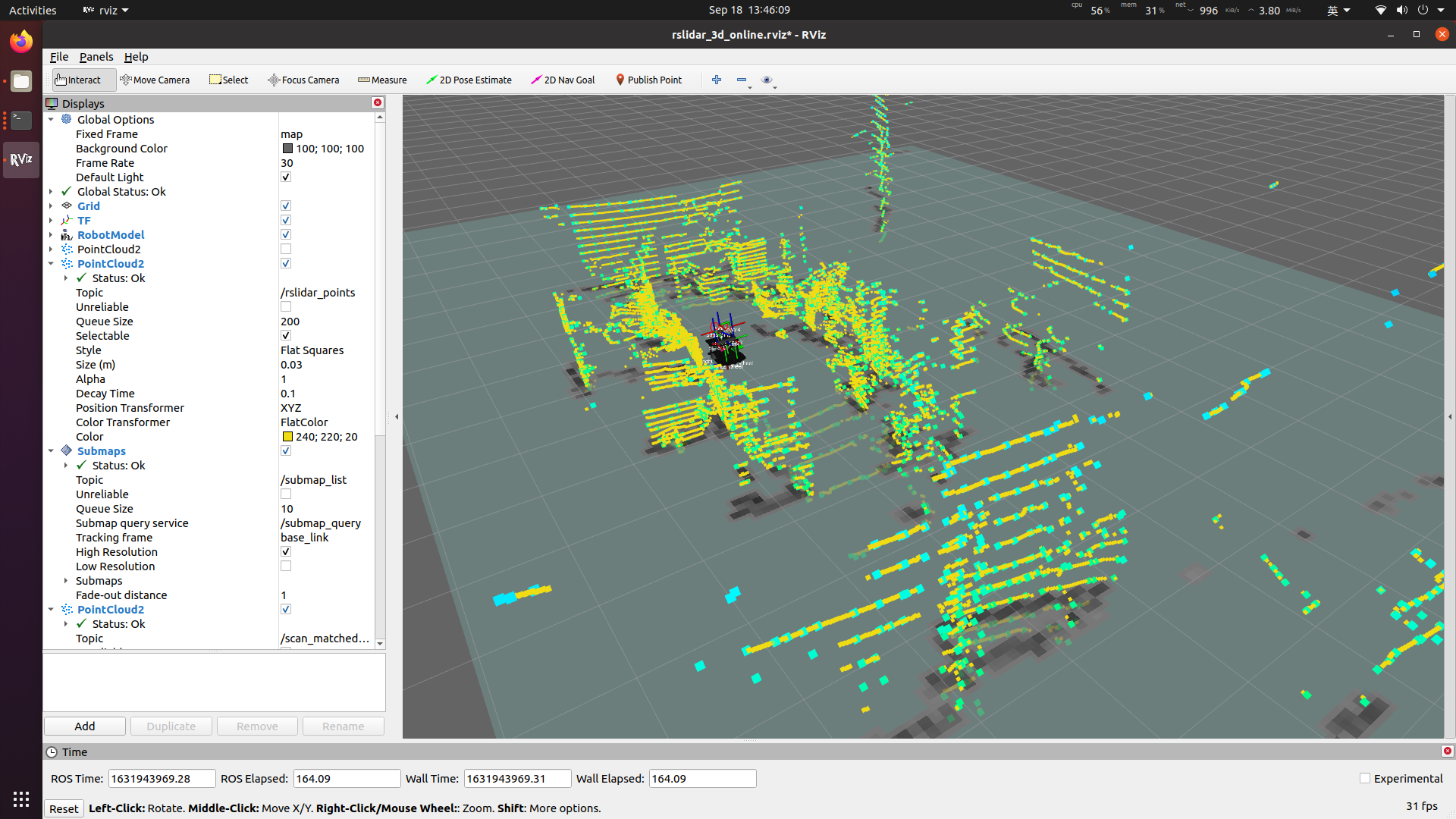
3. 用windows客户端或者ps4手柄遥控小车移动开始建图,建图完成后调用地图保存命令
#先结束建图 rosservice call /finish_trajectory 0 #再保存地图文件 rosservice call /write_state /home/xiaoqiang/local_test.pbstream #local_test.pbstream这个文件后面就可以用于定位模式4. 关闭建图节点,开启测试定位节点。
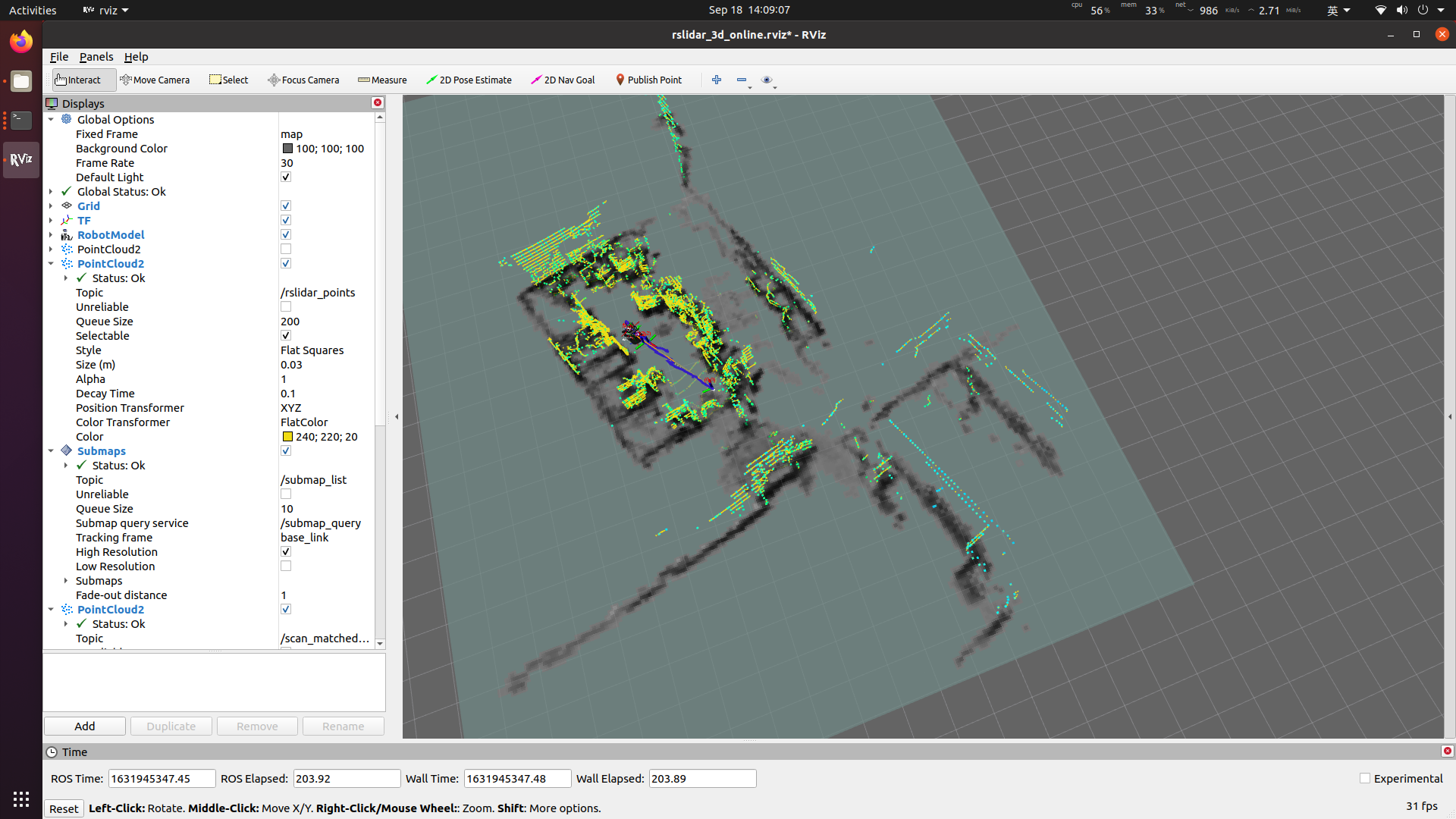
roslaunch cartographer_ros xiaoqiang_3d_localization.launch load_state_filename:=/home/xiaoqiang/local_test.pbstream启动后正常会在rviz中显示如下类似界面,可以看到之前建立的地图轮廓和当前点云。刚开始初始位置不对,所以没有对齐。
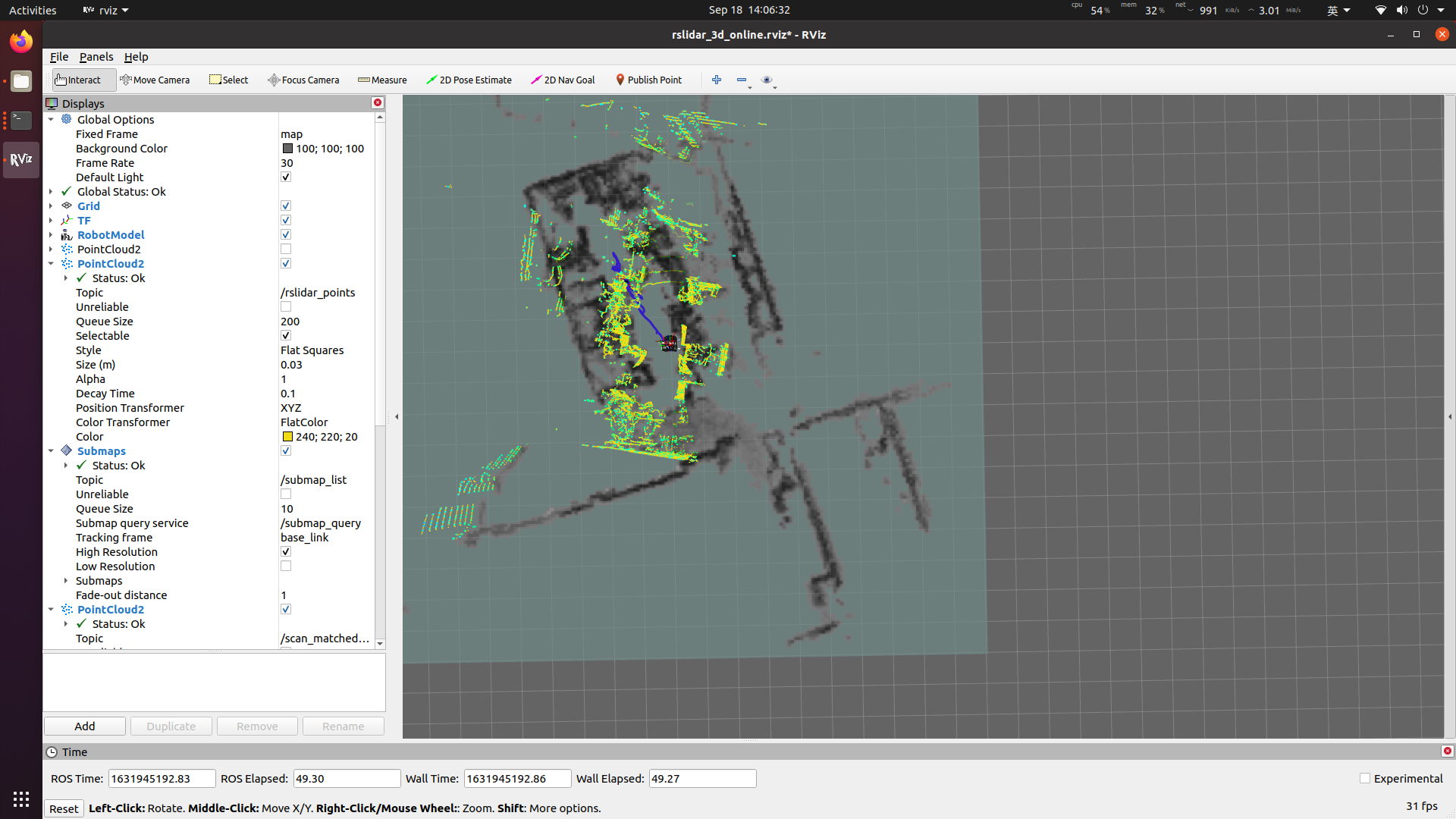
4. 用windows客户端或者ps4手柄遥控小车移动一段距离,在rviz可以看到点云会变成和地图轮廓重合,机器人重定位完成。即从现在开始,机器人在地图中的位置是准确的,可以用于导航了。
-
提高roslaunch和rosrun启动速度发布在 技术交流
优化方向是减少磁盘读写过程:
1.对于rosrun主要是catkin_find函数太占用时间,可以去掉–share选项,同时把搜索share的过程去掉。最后把debug函数注释掉。
2.对于roslaunch,可以将–skip-log-check选项默认值改成true,不检查log大小
3.如果执行下列语句发现numpy加载太慢,比如耗时2秒以上python -X importtime -c "import numpy"可以重新升级安装numpy
python -m pip install --upgrade -force-reinstall numpy
-
树莓派4 将sd卡镜像拷贝到usb ssd后无法启动ubuntu发布在 技术交流
主要问题在于kernel启动文件没有解压,和启动文件设置问题。解决办法参考https://jamesachambers.com/raspberry-pi-4-ubuntu-20-04-usb-mass-storage-boot-guide/
-
jetson nano升级遇到 Procedure for xusb firmware update FAILED错误解决办法发布在 技术交流
这个是python版本混乱引起的,更新程序默认是python2,系统如果把python版本默认为3.X后,就会触发这个问题。
解决办法是:sudo vim /usr/sbin/l4t_payload_updater_t210 将文件开头的#!/usr/bin/python 强制指定为#!/usr/bin/python2