@vvhahaha 列举的异常都不是不能移动的真正原因,这些错误可以忽略。真正的原因可能是设置的目标点周围都是障碍物,本身就是不可到达。还有一个如果是虚拟机方式,确保小强车载主机hosts文件里面添加了虚拟机的ip地址,现在能看到图说明虚拟机可以接收小强主机发出的ros数据,但是小强主机无法接收到虚拟机发出的ros数据。
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
xiaoqiang 发布的帖子
-
RE: 使用kinect进行自主移动避障发布在 技术交流

-
RE: vnc远程桌面方式无法打开rviz的解决办法发布在 技术交流
设置为1360x768分辨率
xrandr --newmode "1360x768_60.00" 84.72 1360 1424 1568 1776 768 769 772 795 -HSync +Vsync xrandr --addmode VIRTUAL1 1360x768_60.00激活虚拟显示器后可以用xrandr --fb设置为其他分辨率
xrandr --fb 1920x1080
-
vnc远程桌面方式无法打开rviz的解决办法发布在 技术交流
rviz打开的前提是能检测到显示器,对于小强用户,可以有两种解决办法:
第一种办法,插上配送的hdmi转vga转接头(不用接显示器),这样可以激活显示器。
第二种办法,使用xrandr配置一个虚拟显示器xrandr --newmode "1920x1080_60.00" 173.00 1920 2048 2248 2576 1080 1083 1088 1120 -hsync +vsync xrandr --addmode VIRTUAL1 1920x1080_60.00
-
RE: 激光雷达和深度相机的融合发布在 讨论区
@sq 障碍物可以用cotsmap的不同层来实现融合,比如深度相机的三维点云适合这个http://wiki.ros.org/voxel_grid,详细参考这里https://blog.zhaw.ch/icclab/configuring-the-ros-navigation-stack-on-a-new-robot/
-
RE: 小强出现了问题发布在 产品服务
@YuBicheng 你的可能是xq4 pro平台,要安装pro镜像,不能安装lungu镜像。底盘stm32和主机是串口连接,在主机上执行ls /dev要能找到ttyUSB001这个底盘串口设备,如果找不到可能是udev规则没有配好,或者串口线没有插对usb口
-
北科天绘32线激光雷达R-Fans-32的ros驱动安装与rviz点云显示发布在 激光雷达
32线雷达的使用和16线基本是一样的,雷达通信设置参考这篇教程的1、2部分:北科天绘16线激光雷达R-Fans-16的ros驱动安装与rviz点云显示
配置好后,和16线雷达测试上的唯一不同点在步骤4里面启动的launch文件。#xq4 pro小强开发平台,配32线激光雷达,需要启动下面这个文件 roslaunch rfans_driver xiaoqiang_pro.launch
-
RE: google激光雷达slam算法Cartographer的安装及bag包demo测试发布在 产品服务
@zhouyi 用rosrun方式启动
rosrun cartographer_ros cartographer_rosbag_validate -bag_filename /home/cubot/ROS/catkin_ws_cartographer/bag/b3-2016-04-05-14-14-00.bag
-
rosdep init 或者rosdep update 连接错误的解决办法发布在 技术交流
本文内容已经失效,rosdep问题可以跳过忽略,不影响ros使用。
如果提示的是 ERROR: unable to process source https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/xxxxx 之类的错误,同时保证自己机器可以上百度的前提下,此时可能是因为raw.githubusercontent.com网站被墙了。
解决办法是修改hosts文件,添加这个网站的ip地址#打开hosts文件 sudo gedit /etc/hosts #在文件末尾添加 151.101.84.133 raw.githubusercontent.com #或者 151.101.76.133 raw.githubusercontent.com #保存后退出再尝试再重新尝试
-
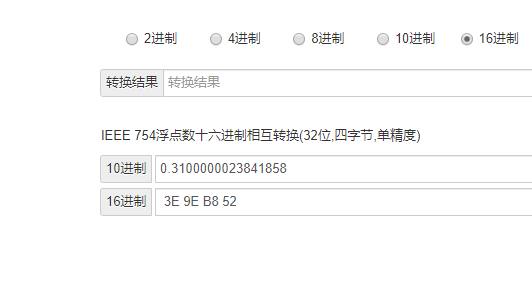
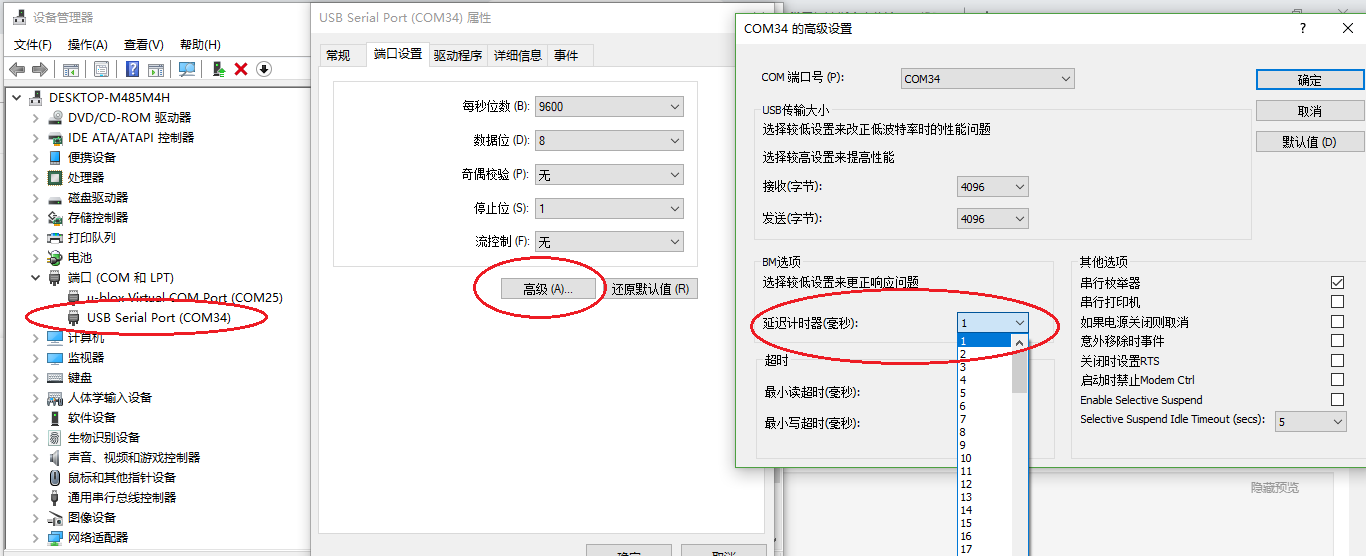
降低windows系统里面usb转串口模块延时的办法发布在 技术交流
在使用MTOOLs软件测试蓝鲸轮毂驱动器时,可能会遇到串口数据显示卡顿的问题,这是由usb转串口模块驱动参数的默认配置值不合适导致的。
在设备管理器中将串口模块延时设置为1ms可以解决这个问题,参考下图红框
-
RE: google激光雷达slam算法Cartographer的安装及bag包demo测试发布在 产品服务
@Griffin-MX 错误提示工作空间存在非catkin 包文件夹,找到这个包,然后删除。cartographer和cartographer_ros都需要安装蓝鲸github版本
-
RE: square.py执行问题发布在 讨论区
@murongsina 不要轻易更新固件,固件不一定适合你的底盘。底盘型号虽然都是一样的,但是也可能存在定制修改内容。udev规则设置一下,让底盘串口映射成ttyUSB001