@zhaoyu24 cartographer_ros_msgs包没有编译成功或者source问题,参考https://github.com/googlecartographer/cartographer_ros/issues/1078
ROS交流群
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
ROS Group 产品服务
Product Service 开源代码库
Github 官网
Official website 技术交流
Technological exchanges 激光雷达
LIDAR ROS教程
ROS Tourials 深度学习
Deep Learning 机器视觉
Computer Vision
xiaoqiang 发布的帖子
-
RE: google激光雷达slam算法Cartographer的安装及bag包demo测试发布在 产品服务

-
jetson nano 安装jetson-inference遇到nvidia.box.com无法连接的解决办法发布在 技术交流
删除build文件夹内的所有内容,使用下面的命令将nvidia.box.com替换成国内源。
#在jetson-inference源代码根目录内执行 sed -in-place -e 's@https://nvidia.box.com/shared/static@https://bbs.gpuworld.cn/mirror@g' CMakePreBuild.sh重新cmake编译
-
jetson nano fcitx中文输入法 没有提示框和提示框字体太小的解决办法发布在 技术交流
没有提示框,需要卸载一个包。
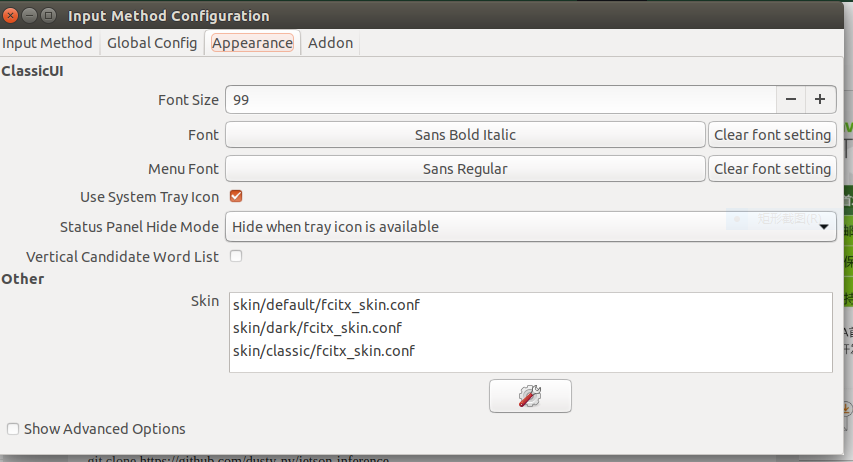
sudo apt remove fcitx-module-kimpanel提示框字体太小看不清,skin选择classic,同时调整字体大小
-
RE: 蓝鲸机器人采用的imu是razor_9dof_imu吗?发布在 技术交流
@terminal 不是,校准参考https://doc.bwbot.org/en/books-online/xq-manual/topic/113.html
-
测试amcl导航时机器人移动很慢,修改DWA参数也无效的解决办法发布在 技术交流
DWA局部规划器需要使用odom话题里面的twist信息,如果配置move_base时没有配置好odom话题,或者odom话题没有发布,则可能出现这种情况。解决办法是,将move_base中的odom话题remap成自己机器人的里程计话题。
-
RE: 采用V-SLAM技术,Intel发布RealSense T265深感模组发布在 行业动态
@xiaoqiang 这款产品的特点是V-SLAM直接跑在传感器内部的vpu里面了,不需要占用主机资源,而且支持闭环优化。它和xvisio诠视科技公司的产品几乎是一模一样的。由于内部VPU和intel的神经计算棒NCS2是一样的,它也可以支持tensorflow加速,因此这款传感器除了V-SLAM,后续在目标识别等领域也有极大的应用潜力。
-
采用V-SLAM技术,Intel发布RealSense T265深感模组发布在 行业动态
1月24日消息,Intel发布一款全新深度摄像头RealSense T265,可为AR/VR头显、机器人、无人机提供6DoF inside-out追踪。据悉,该产品采用Intel独有的V-SLAM技术,一项混合了视觉惯性测程(VIO)和SLAM的技术。

Intel RealSense部门副总裁兼总经理Sagi Ben Moshe表示:“T265的作用是补充现有的Intel RealSense深度摄像头,通过集成的V-SLAM技术为产品研发提供快速通道。”
T265使用Intel Movidius Myriad 2 VPU(视觉处理单元)来处理追踪数据,该VPU的好处在于可以让摄像头实现小巧、节能的设计。

这款新产品的定位是,一款面向企业和建造机器人和无人机的个人的解决方案,它的特点是能够在仓库和工业中心等地点,根据物理环境提供地点信息。这款新摄像头可让硬件厂商实现6DoF追踪的集成,将T265的追踪与RealSense D系列的深度传感功能结合效果更好。
T265目前售价199美元,https://click.intel.com/order-intel-realsense-tracking-camera-t265.html
-
RE: 谷歌cartographer使用速腾聚创3d激光雷达数据进行三维建图发布在 激光雷达
@Duke-Allen cartographer还没有正常工作,没有开始建图所以没有发布map相关的tf。先让 cartographer正常工作,开始建图后就有了
-
RE: 谷歌cartographer使用速腾聚创3d激光雷达转二维数据进行2d建图发布在 激光雷达
# cartographer_ros/configuration_files/xiaoqiang_rslidar_scan.lua文件里面设置是否使用imu、odom数据的参数是这两个: use_odometry = true #true使能里程计,false禁用里程计 TRAJECTORY_BUILDER_2D.use_imu_data = false #true使能IMU,false禁用IMU
-
RE: 谷歌cartographer直接使用速腾聚创3d激光雷达三维数据进行2d建图发布在 激光雷达
@Jaccica 没有错误,新版map_server支持occ和free参数,不支持这些参数的老版本map_server保存出来的地图会有问题
-
RE: RVIZ可视化窗口中能给检测到目标添加一个立方体的框吗?发布在 ROS教程
@道灼 试试发布成marker类型话题 http://wiki.ros.org/rviz/DisplayTypes/Marker
-
星秒科技tof激光雷达PAVO的ros驱动安装与测试发布在 技术交流
下载链接:PAVO激光雷达windows资料包
星秒科技激光雷达pavo的供电是直流12v 1A,通信接口是rs485网络接口。小强ros开发平台用户可以用底盘dc电源头供电,主机的网口也可以直接连接雷达。下面介绍它的ros驱动安装和测试教程,如果是和小强平台一起购买的雷达,小强主机出厂时已经配置好驱动,请直接跳过安装部分。
1.在windows平台设置雷达网络接口参数
pavo雷达的网络接口是静态ip分配方式,且需要用官方配置软件编辑它的固件才能设置网络参数。
使用官网提供的PavoView软件,根据《PavoView使用指南-V1.1.2.pdf》手册设置雷达和主机的ip地址。因为主机往往还需要连接其他网络,因此最好按照下图设置成169.254.x.x网段,这个网段ubuntu默认为本地网络,不会干扰其它网络的运行。
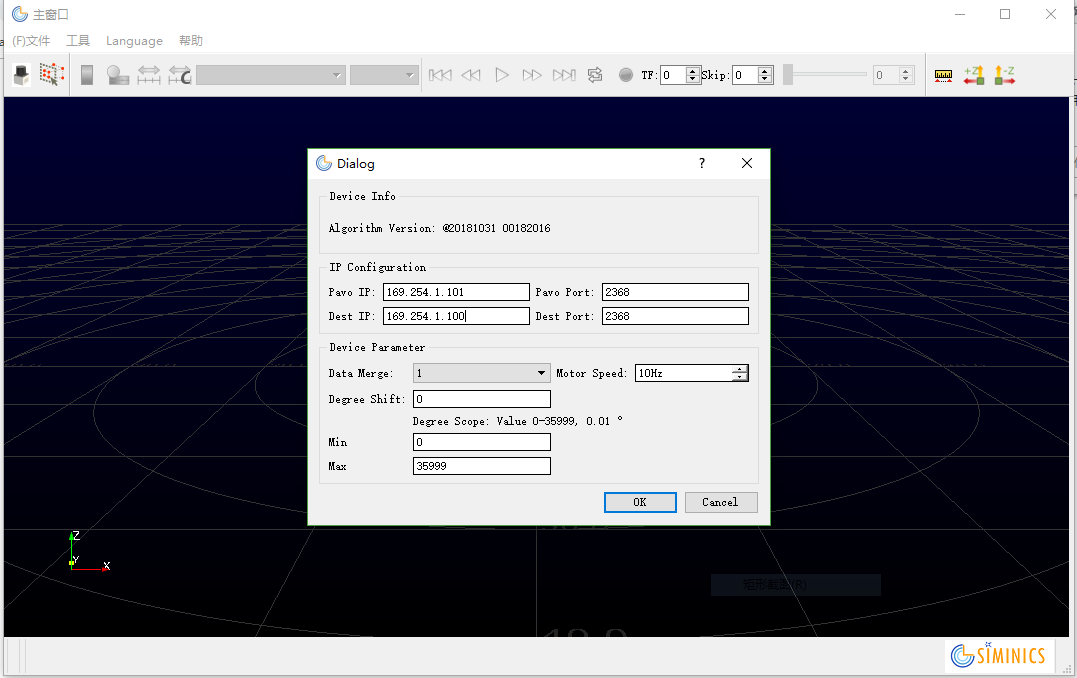
它的ros驱动也需要指定ip地址参数,为了后续教程的方便,请将ip地址按照上图的地址设成一模一样2.根据步骤1中的ip地址设置ros主机的有线网络
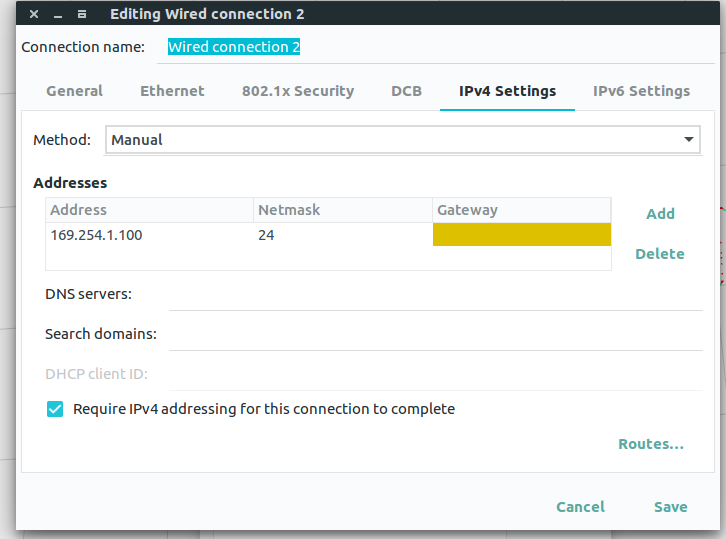
3.安装ros驱包pavo_ros
#ros_rslidar需要安装到ros工作空间,以小强主机为例 cd ~/Documents/ros/src git clone https://github.com/BluewhaleRobot/pavo_ros.git #tof雷达会有拖尾现象,需要用laser_filters包进行过滤 git clone https://github.com/BluewhaleRobot/laser_filters.git cd .. catkin_make4.将雷达接入电源,同时用网线连接ros主机,启动ros驱动launch文件
roslaunch pavo_ros xiaoqiang.launch #启动成功后,驱动节点默认会发布10hz的点云话题/scan,这个话题的frame_id是laser,上面的launch文件也发布了base_link到laser的tf关系,请根据实际安装参数进行调整。6.在rviz中显示发布的点云数据
roscd pavo_ros/rviz rviz -d pavo_xiaoqiang.rviz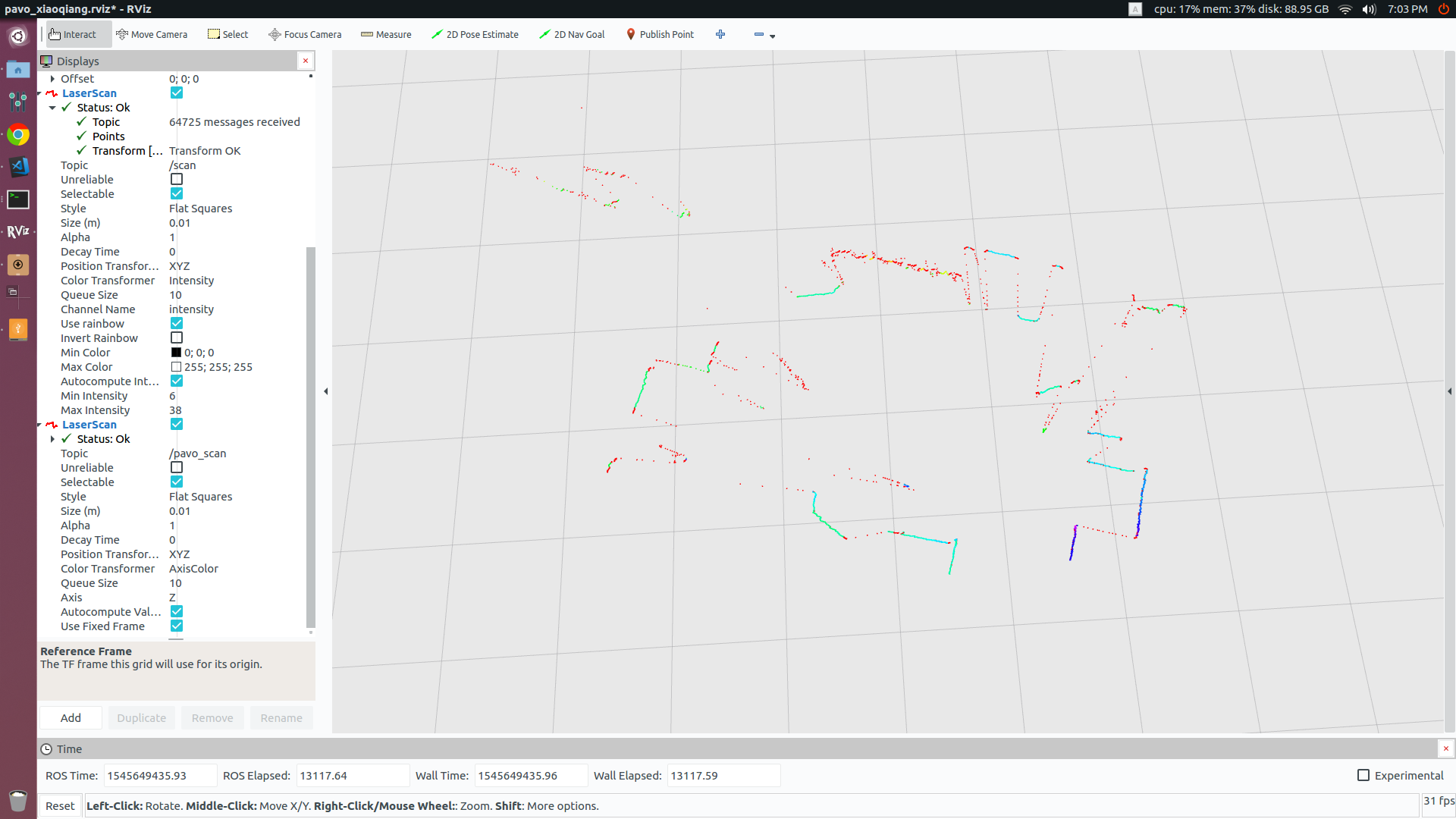
在rviz里面可以对比原始数据/pavo_scan和过滤处理后的数据/scan的区别。
-
小觅双目摄像头固件升级失败的解决办法发布在 技术交流
小觅官方没有提供固件烧录工具,只提供了固件升级工具,但是他们方案实际是一种通用方案,找到了其它摄像头厂家的烧录工具,测试后发现可以正常烧写小觅摄像头。
固件升级失败后,摄像头会无法识别,在windows设备管理器未知设备选项里面会显示"WestBridge",解决办法是先安装摄像头的usb3.0控制器驱动,这样就可以用usb3.0控制器厂家提供的固件升级工具重新烧写固件。
详细步骤参考:http://withrobot.com/en/technical-data/?ckattempt=1&uid=20&mod=document&pageid=1
-
ubuntu upstart任务崩溃,错误提示:exception basic_string::_M_construct发布在 技术交流
碰到一个ros程序,正常命令行启动一切正常,但是upstart方式启动会触发异常。经过debug发现是因为使用了“std::getenv”方法,这个方法在upstart启动方式下显然是有问题的,因为此时很多环境变量是没有设置的,即导致获取失败引发后续bug。
-
小强ROS机器人教程(29)___安装使用zed相机cpu版本ros驱动发布在 产品服务
官方sdk和ros驱动需要使用cuda,如果主机不支持cuda就无法使用这些软件包,也就无法使用zed相机。很幸运,zed相机是一个uvc标准的摄像头,有第三方的ros驱动可以支持无nvidia显卡的主机使用。因为只使用cpu,因此只能获取摄像头的双目图像,官方的slam和深度信息处理功能是无法使用的。
下文将详细介绍如何在小强主机上安装使用zed相机cpu版本ros驱动。对于一些出厂已经配置过zed的小强用户,请跳过驱动安装步骤,可以直接启动相关launch文件进行测试。1. 在主机ros catkin工作空间中下载安装zed的ros驱动包
如果是已经配置好的小强用户,可以直接跳过本步骤。
#假设catkin工作空间在~/Documents/ros cd ~/Documents/ros cd src/ git clone https://github.com/BluewhaleRobot/zed_cpu_ros.git cd .. catkin_make2.将zed接入主机usb,添加udev规制,将设备号映射为/dev/video003
如果是已经配置好的小强用户,可以直接跳过本步骤。
#查看zed相机的id信息,即下条命令输出结果中以{SUBSYSTEM=="video4linux"}开头的部分内容,/videoXXX需要替换成实际设备号 udevadm info --name=/dev/videoXXX --attribute-walk#根据id信息,建立udev规则文件/etc/udev/rules.d/56-zed.rules,下面内容可供参考。对于非小强用户,xiaoqiang需要更换成自己的计算机用户名 SUBSYSTEM=="video4linux", ATTR{name}=="ZED: ZED", MODE:="0666", OWNER:="xiaoqiang", SYMLINK+="video003"#最后重新加载udev规则 udevadm control --reload-rules #重新插拔zed相机,如果 ls /dev可以看到video003设备,说明操作成功。3.启动ros驱动节点,正常的话可以在rviz中订阅显示zed的图像数据。
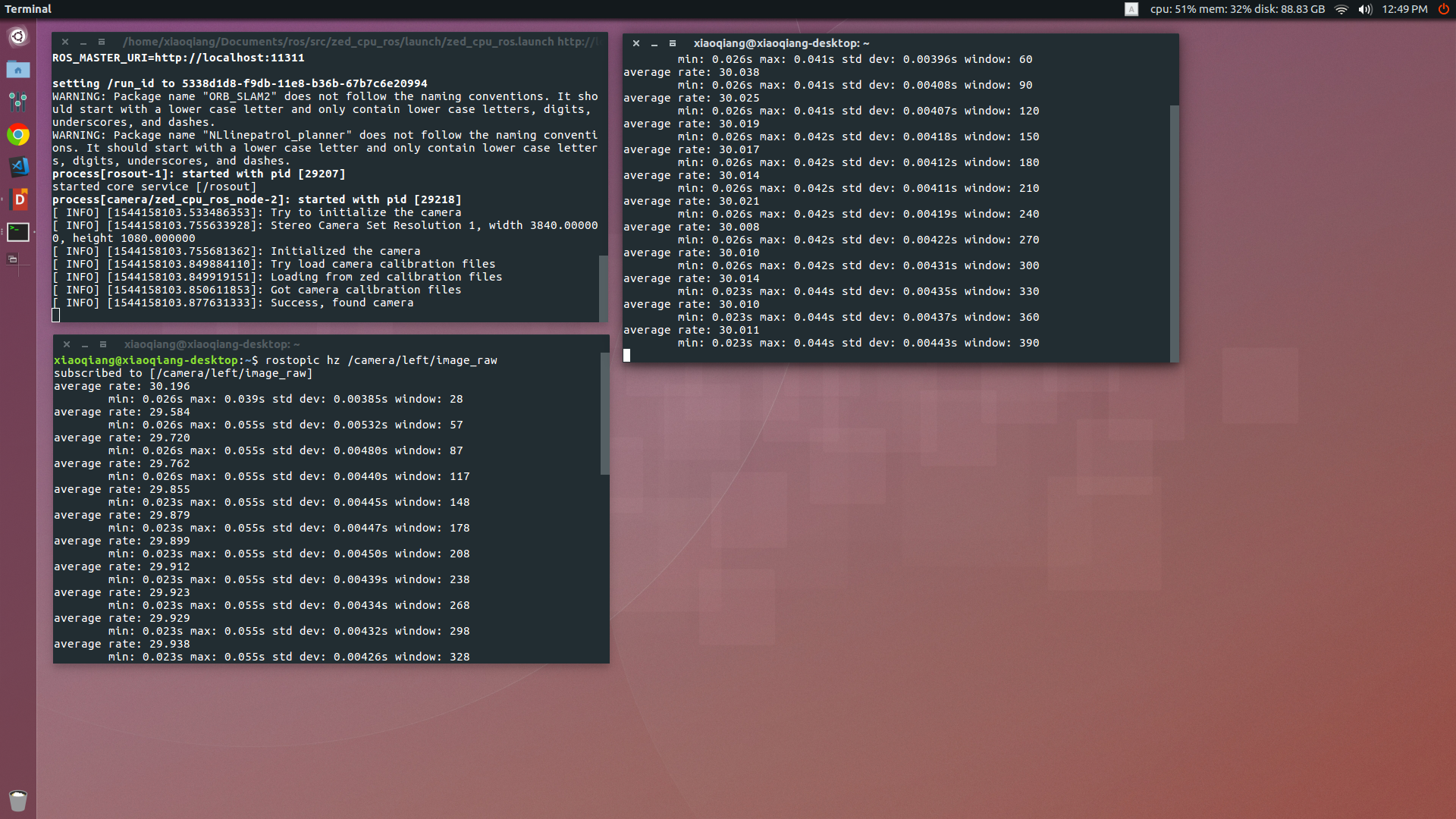
roslaunch zed_cpu_ros zed_cpu_ros.launch